L298 모터 드라이버 IC : 기능, 핀아웃 및 응용 프로그램
이 기사는 L298 모터 드라이버 IC의 기능과 응용에 깊이 파고 들어 두 개의 모터의 독립적 인 제어를 용이하게하는 듀얼 풀 브리지 기능을 탐구합니다.높은 전류를 처리 할 수있는 IC의 능력은 까다로운 시나리오에서 신뢰성과 내구성을 말해서 모터 구동 프로젝트의 운영 수명과 효율성을 확장하는 데있어 주요 플레이어임을 입증합니다.목록
L298 모터 드라이버 IC의 개요
L298 모터 드라이버 IC는 풍부한 기능을 제공함으로써 전임자 L293의 잠재력을 확장합니다.TTL 로직과의 원활한 통합으로 DC 및 Stepper Motors와 같은 다양한 유도 부하를 처리합니다.전류 증폭기 역할을하면서 모터를 효과적으로 강화하기 위해 약한 신호를 향상시킵니다.L298에는 2 개의 별개의 H 브리지 A 및 B를 형성하는 4 개의 전력 증폭기가 포함되어 있습니다. 이러한 구조는 모터 극성을 지휘하고 스테퍼 모터 작동을 가능하게하여 정밀한 응용 분야의 모터 관리의 유연성을 부여하는 데 중요합니다.
각 H- 브리지는 운동 방향과 속도 제어를 효율적으로 용이하게합니다.기계적 스위치가 필요 없이이 설정을 자주 사용하여 모터 방향을 동적으로 변경하십시오.이 방법은 신뢰성과 장수를 모두 향상시켜 자동화 프로젝트를위한 탄력성 옵션을 제공합니다.활성화 및 입력 핀 모두에 대한 5V TTL 로직과 함께 작동하도록 설계된 L298은 자동화 및 로봇 공학에 사용되는 다양한 마이크로 컨트롤러와 쉽게 짝을 이룹니다.
방열판과 적합한 전원을 사용하는 것은 우수한 성능을 보장하기 위해 일반적인 관행이며, 장치의 작동 경계에 대한 미묘한 이해를 강조합니다.L298을 구현하는 동안 안정적인 연결 및 신호 무결성을 유지하는 것이 모터 제어의 오류를 줄이기 위해 우선 순위를 정합니다.이 접근법은 정밀도와 일관성을 요구하는 프로젝트에서 분명합니다.L298의 매력은 다양한 요구에 대한 대응성에 있으며, 고급 산업 응용 프로그램을 갖춘 간단한 학습 환경을 연결합니다.이 다목적 성은 전자 제품 및 모터 제어의 진화하는 환경에서 그 자리를 확보합니다.
L298 모터 드라이버 IC의 핀 구성
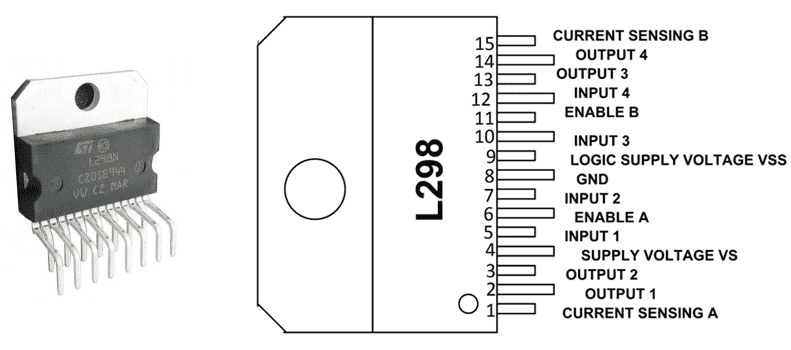
• 핀 1 (전류 감지 a) :이 핀은 H- 브리지 A에 연결된 하중을 통해 흐르는 전류를 모니터링하고 조절합니다.
• 핀 2 & 3 (출력 1 & 2) :이 핀은 H- 브리지 A의 출력 역할을하여 하중에 전류를 전달하고 핀 1에 의해 모니터링됩니다.
• 핀 4 (VS) :이 핀은 +5V 전원 공급 장치에 연결됩니다.
• 핀 5 & 7 (입력) :이 핀은 H- 브리지 A를 제어하고 TTL 로직 레벨과 호환됩니다.
• PIN 6 (활성화 a) :이 핀은 H- 브리지 A를 활성화하는 데 사용되며 TTL도 호환됩니다.
• 핀 8 (GND) : 이것은 접지 연결입니다.
• 핀 9 (로직 전압 공급) :이 핀은 로직 회로의 전압을 제공합니다.
• 핀 10 및 12 (입력 3 & 4) :이 핀은 H- 브리지 B를 제어하고 TTL 호환입니다.
• PIN 11 (활성화 B) :이 핀은 H- 브리지 B를 활성화하고 TTL 호환 가능합니다.
• 핀 13 & 14 (출력 3 & 4) :이 핀은 H-Bridge B의 출력 역할을하며 현재 모니터링은 핀 15에 의해 수행됩니다.
L298 IC의 사양
|
명세서 |
세부 |
|
작동 전압 공급 |
최대 46V |
|
총 DC 전류 |
최대 4A |
|
낮은 포화 전압 |
예 |
|
과잉 온도 보호 |
예 |
|
전력 소산 |
25W |
|
작동 전압 범위 |
+5V ~ +46V |
|
최대 공급 전압 |
50V |
|
최대 입력 및 활성화 전압 |
+7V |
|
TTL 제어 입력 |
예 |
|
저장 온도 범위 |
-40 ° C ~ 150 ° C |
|
작동 온도 범위 |
-23 ° C ~ 130 ° C |
|
출력 당 최대 허용 전류 흐름 |
3A |
L298 모터 드라이버 IC 회로 설계
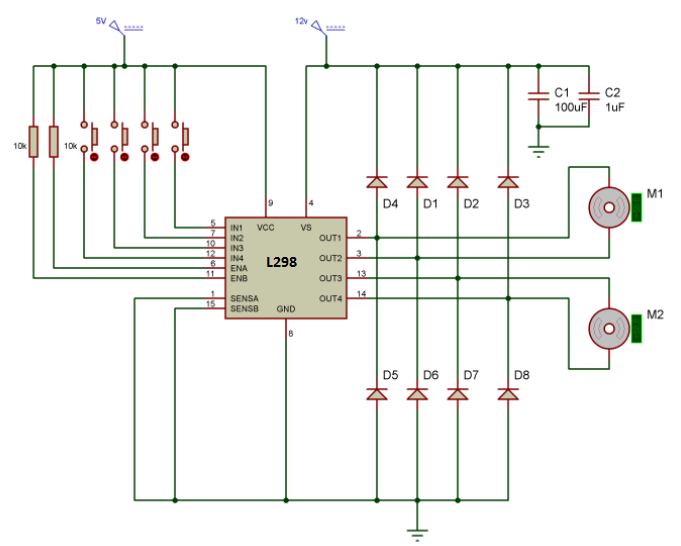
L298을 다양한 응용 분야로 가져 오면 운동 제어 효과가 풍부합니다.여기에는 L298 기능의 잠재력을 최대한 활용하여 명확한 회로 설정이 포함됩니다.핵심에는 모터 기능을위한 H- 브리지 A가 있습니다.신중하게 배치 된 두 개의 푸시 버튼은 모터 방향을 조정하기 위해 로직 입력을 정의합니다.이러한 입력은 전진, 리버스 및 빠른 정지와 같은 동작을 완벽하게 활성화합니다.다양한 맥락에서,이 촉각 피드백은 정밀성을 선명하게하여 작업의 직관적 인 특성을 향상시킵니다.
플라이 백 다이오드는 모터 기능 중 전압 스파이크에 대응하기 위해 통합됩니다.이 다이오드는 회로 구성 요소를 차폐하여 수명을 촉진합니다.전자기 간섭을 해결하면 제어 시스템 무결성을 유지하는 데 중요한 역할을합니다.활성화 핀은 모터 드라이버 작업을 조절합니다.이 핀을 활성화하면 다양한 시나리오에서 자세한 모터 제어 및 효율성 향상이 가능합니다.이것은 L298의 다른 환경 조건에 대한 적응성을 보여줍니다.라벨 Q1 및 Q2는 정확한 운동 방향 제어를 제공합니다.예를 들어, Q1이 높고 Q2가 낮 으면 전방 동작이 발생하는 반면 역전을 활성화합니다.피크 성능에 필요한 세심한 조정을 소중히 여깁니다.
L298 모터 드라이버 IC의 응용
로봇 공학 및 자동화
L298은 로봇 공학의 고출력 모터로 저전압 마이크로 컨트롤러를 능숙하게 연결합니다.강력한 H- 브리지 구성은 요구하는 전력 작업을 관리하여 제어 문제를 해결합니다.L298을 사용하면 모터 제어 정밀도가 향상되어 민첩한 로봇 시스템의 개발에 기여합니다.
펄스 폭 변조 (PWM) 적응성
L298은 PWM을 적절하게 처리하여 DC 모터 속도를 원활하게 제어합니다.미세 조정 속도 조정이 필요한 시나리오에 적합합니다.Industry Insights는 PWM을 L298과 통합하는 것이 에너지 사용을 최적화하고 운동 수명을 연장하여 여러 기술 응용 분야에서의 매력에 영향을 미칩니다.
TTL 출력 호환성
L298은 TTL 출력 제어 요구를 완벽하게 충족하여 마이크로 컨트롤러와 쉽게 연결할 수 있습니다.이 호환성은 시스템 설계를 간소화하여 다양한 전자 구성 요소가 조화롭게 협력 할 수 있도록합니다.L298은 회로 아키텍처를 단순화하여 복잡성을 줄이면서 신뢰성을 향상시킵니다.
DC 모터 통합
효율성과 신뢰성이 필요한 상황에서 L298은 마이크로 컨트롤러와 DC 모터 통합을 용이하게합니다.용량을 활용하면 더 부드러운 작동과 성능 향상이 발생합니다.연구에 따르면 L298을 사용하는 시스템은 확장 성이 향상되어 다양한 환경에서 운영 범위를 넓히는 것이 좋습니다.
결론
L298 모터 드라이버 IC는 DC 모터 제어를위한 다목적이고 강력한 솔루션을 제공합니다.고전류의 강력한 처리와 함께 듀얼 모터를 독립적으로 관리하는 능력은 로봇 공학 및 자동화 시스템 설계에 관련된 사람에게 귀중한 도구입니다.열 보호 및 다양한 전압 수준과의 호환성과 같은 기능의 통합은 실용성과 적응성을 더욱 강조하여 광범위한 기술 요구 사항을 충족시킬 수 있도록합니다.이 기사에서 L298의 탐색은 기술 사양과 잠재적 응용 분야를 조명 할뿐만 아니라 운동 제어 기술 분야의 발전에도 역할을 보여줍니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
2N3904 트랜지스터 가이드 : 기능, 용도 및 완전한 데이터 시트
10월3일에서

TLV3201AQDCKRQ1 전압 비교기 : 기능 및 작동 원리
10월2일에서
인기있는 게시물
-
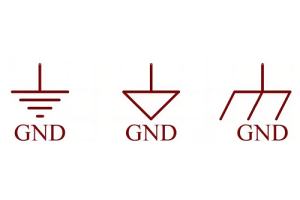
회로에서 GND는 무엇입니까?
1월1일에서 2915
-

RJ-45 커넥터 가이드 : RJ-45 커넥터 색상 코드, 배선 체계, R-J45 응용 프로그램, RJ-45 데이터 시트
1월1일에서 2478
-

파이버 커넥터 유형 : SC 대 LC 및 LC 대 MTP
1월1일에서 2073
-
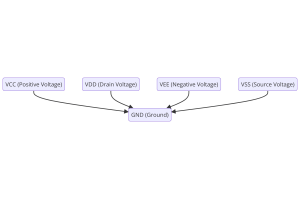
전자 제품 VCC, VDD, VEE, VSS 및 GND의 전원 공급 장치 이해
11월8일에서 1862
-

DB9와 RS232의 비교
1월1일에서 1756
-

LR44 배터리는 무엇입니까?
유비쿼터스 힘 인 전기는 사소한 기기에서 생명을 위협하는 의료 장비에 이르기까지 일상 생활의 모든 측면에 조용히 스며 들어 침묵하는 역할을합니다.그러나이 에너지, 특히 저장하고 효율적으로 출력하는 방법을 진정으로 파악하는 것은 쉬운 일이 아닙니다.이 기사는 표면에 중요하지 않은 것처럼 보일 수 있지만 실제 응용 분야, 즉 LR44 배터리에서 매우 다재다능한 코인 셀 배터리 유형에 초점을 맞출 것입니다.이 기사는 ...1월1일에서 1705
-
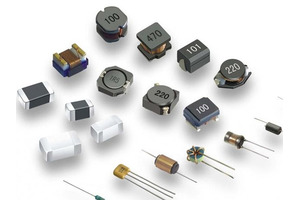
기본 이해 : 인덕턴스 저항 및 정관
전기 공학의 복잡한 춤에서, 기본 요소의 트리오는 인덕턴스, 저항 및 커패시턴스와 같은 중심 단계를 차지합니다.각각은 전자 회로의 역동적 인 리듬을 지시하는 독특한 특성을 나타냅니다.여기서 우리는 이러한 구성 요소의 복잡성을 해독하고 광대 한 전기 오케스트라 내에서 뚜렷한 역할과 실용적인 용도를 발견하기위한 여정을 시작합니다.자기 플럭스 마법사와 함께 인덕턴스;저항, 전류 흐름의 확고한 게이트 키퍼;그리고 ...1월1일에서 1647
-

CR2430 배터리 종합 가이드 : 사양, 응용 프로그램 및 CR2032 배터리 비교
CR2430 배터리는 무엇입니까?CR2430 배터리의 이점표준CR2430 배터리 애플리케이션CR2430 동등한CR2430 대 CR2032배터리 CR2430 크기CR2430 및 이와 동등한 것을 구입할 때 찾아야 할 사항데이터 시트 PDF자주 묻는 질문 배터리는 소형 전자 장치의 핵심입니다.사용 가능한 많은 유형 중에서 코인 셀은 일반적으로 계산기, 리모컨 및 시계에서 발견되는 중요한 역할을합니다.작은 크기에도 불구하고 각 코인 셀에는 독특한 장점이 ...1월1일에서 1534
-
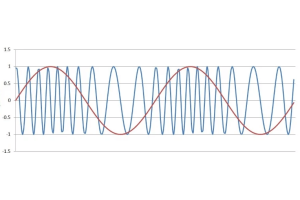
RF는 무엇이며 왜 우리는 그것을 사용합니까?
무선 주파수 (RF) 기술은 현대 무선 통신의 핵심 부분으로, 물리적 연결없이 장거리에 걸쳐 데이터 전송을 가능하게합니다.이 기사는 RF의 기본 사항을 탐구하여 전자기 방사선 (EMR)이 RF 커뮤니케이션을 가능하게하는 방법을 설명합니다.우리는 EMR의 원칙, RF 신호의 생성 및 제어 및 광범위한 사용을 탐구 할 것입니다.이 기사는 또한 RF 기술의 역사적 이정표, 관련된 기술 과제 및 안정적인 RF 커뮤니케이션을 보장하는 데 ...1월1일에서 1523
-

CR2450 대 CR2032 : 대신 배터리를 사용할 수 있습니까?
리튬 망간 배터리는 다른 리튬 배터리와 유사합니다.높은 에너지 밀도와 긴 서비스 수명은 공통적 인 특성입니다.이러한 종류의 배터리는 고유 한 안전 때문에 많은 소비자의 신뢰와 호의를 얻었습니다.값 비싼 기술 가제트?우리 집의 작은 가전 제품?주위를 둘러 보면 어디에서나 볼 수 있습니다.이 많은 리튬-망간 배터리 중 CR2450 배터리와 CR2032 배터리는 특히 눈에 띄게됩니다.더 깊은 이해를 위해서는 차이점을 신중하게 ...1월1일에서 1497
핫 부품 번호
-

SMA5J30A-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 30VWM 48.4VC DO214AC
AD7417ARU
Analog Devices Inc.
SENSOR DIGITAL -40C-125C 16TSSOP
CL10C4R7CB8NNNC
Samsung Electro-Mechanics
CAP CER 4.7PF 50V C0G/NP0 0603
RT1206BRE073K6L
YAGEO
RES SMD 3.6K OHM 0.1% 1/4W 1206
MX25L51245GZ2I-08G
Macronix
IC FLASH 512MBIT SPI/QUAD 8WSON
VI-24L-CU
Vicor Corporation
DC DC CONVERTER 28V 200W
BTB06-600SWRG
STMicroelectronics
TRIAC SENS GATE 600V 6A TO220AB
BU406G
onsemi
TRANS NPN 200V 7A TO220
MCHC908JW32FAE
NXP USA Inc.
IC MCU 8BIT 32KB FLASH 48LQFP
Z84C1008PEC
Zilog
IC INTERFACE SPECIALIZED 40DIP
PIC24EP128GP206-I/PT
Microchip Technology
IC MCU 16BIT 128KB FLASH 64TQFP
MAX3314ECKA+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 1/1 SOT23-8
SPX2945M3-L-3-3
MaxLinear, Inc.
IC REG LINEAR 3.3V 400MA SOT223
CD240650
Powerex Inc.
DIODE MODULE 600V 50A
KSZ8041TL
Microchip Technology
IC TRANSCEIVER FULL 1/1 48TQFP
MC14082BDG
onsemi
IC GATE AND 2CH 4-INP 14SOIC
LM393ADRG4
Texas Instruments
IC COMPARATOR 2 DIFF 8SOIC
P4SMA27A
Eaton - Electronics Division
TVS DIODE 23.1VWM 37.5VC SMA -

RQ1E050RPTR
Rohm Semiconductor
MOSFET P-CH 30V 5A TSMT8
0603AF-821XJRW
Coilcraft
FIXED IND 820NH 420MA 580MOHM SM
CL10C250JB8NNNC
Samsung Electro-Mechanics
CAP CER 25PF 50V C0G/NP0 0603
MJH11020G
onsemi
TRANS NPN DARL 200V 15A TO247-3
PIC18F6627-E/PT
Microchip Technology
IC MCU 8BIT 96KB FLASH 64TQFP
NPCE985LB1DX
Nuvoton Technology Corporation
IC EMBEDDED CTLR 128QFP
RMCF2512FT22K0
Stackpole Electronics Inc
RES 22K OHM 1% 1W 2512
PM8032C-F3EI
Microchip Technology
TACHYON QE8
BCM43570KFFBG
Broadcom Limited
DUAL BAND 2X2 (IPA) 11AC + BT W/
REF5040AID
Texas Instruments
IC VREF SERIES 0.1% 8SOIC
V33ZA2P
Littelfuse Inc.
VARISTOR 33V 500A DISC 10MM
35TZV330M10X10.5
Rubycon
CAP ALUM 330UF 20% 35V SMD
DAC8563SDSCR
Texas Instruments
IC DAC 16BIT V-OUT 10WSON
SP485RCN/TR
Sipex
UNIT LOAD RS-485 TRANSCVR
25TTS12
Vishay General Semiconductor - Diodes Division
SCR 1.2KV 25A TO220AB
TLK4015IGPV
Texas Instruments
IC TRANSCEIVER FULL 4/4 289BGA
TPD4F202YFUR
Texas Instruments
FILTER RC(PI) 100 OHM/15PF SMD
LT4256-1CS8#PBF
Analog Devices Inc.
IC HOT SWAP CTRLR GP 8SOIC -

AOZ8010DTL
Alpha & Omega Semiconductor Inc.
FILTER RC(PI) 100 OHM/28PF SMD
ICS570B
Renesas Electronics America Inc
IC FANOUT DIST 8SOIC
MIC5800YM-TR
Microchip Technology
IC PWR DRIVER BIPOLAR 1:1 14SOIC
TPS2543RTER
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 16WQFN
VSC7511XMY
Microchip Technology
IC SWITCH ETHERNET 4PORT DRQFN
TPSM53603RDAR
Texas Instruments
DC DC CONVERTER 1-7V
GRM033R61A473ME84J
Murata Electronics
CAP CER 0.047UF 10V X5R 0201
EL1526IL-T13
Renesas Electronics America Inc
IC DRIVER 2/0 24QFN
MCP1825T-1202E/ET
Microchip Technology
IC REG LINEAR 1.2V 500MA 5DDPAK
08055F222K4T2A
KYOCERA AVX
CAP CER 2200PF 50V X8R 0805
SPC5643LF2MLQ1
Freescale Semiconductor
IC MCU 32BIT 1MB FLASH 144LQFP
SMF40A
Diotec Semiconductor
TVS SOD-123FL 40V 200W UNI
GRJ43DR72E224KWJ1L
Murata Electronics
CAP CER 0.22UF 250V X7R 1812
HMC311LP3ETR
Analog Devices Inc.
IC RF AMP GPS 0HZ-6GHZ 16QFN
LM2594HVM-ADJ
Texas Instruments
IC REG BUCK ADJ 500MA 8SOIC
RP507K001B-TR
Nisshinbo Micro Devices Inc.
600MA PWM/VFM STEP-DOWN DCDC CON
S9S12VR64F2CLC
NXP USA Inc.
IC MCU 16BIT 64KB FLASH 32LQFP
ADUM3211ARZ
Analog Devices Inc.
DGTL ISO 2500VRMS 2CH GP 8SOIC