MPU-6050 실행 : 설정, 구성 및 소음 관리에 대한 실용 가이드
목록
MPU-6050 소개
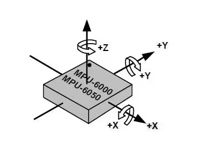
MPU-6050 3 축 자이로 스코프, 3 축 가속도계 및 확장 가능한 디지털 모션 프로세서 (DMP)를 통합하는 세계 최초의 통합 6 축 모션 처리 구성 요소입니다.이를 사용하는 목적은 X, Y 및 Z 축에서 측정 할 물체의 경사각 (예 : 쿼드 콥터, 밸런싱 차량), 즉 피치 각도, 롤 각도 및 요 각도를 얻는 것입니다..I2C 인터페이스를 통해 MPU-6050 (3 축 가속도 AD 값 및 3 축 각속도 AD 값)의 6 가지 데이터를 읽습니다.자세 융합 처리 후, 피치, 롤 및 요 각도를 계산할 수 있습니다.측정 값에 대한 방향 참조로서 센서 좌표 방향의 정의는 아래 그림과 같이 오른 손잡이 좌표계의 원리를 따릅니다 (즉, 오른쪽 엄지 손가락은 X-의 양의 방향을 가리 킵니다.축, 지표 손가락은 y 축의 양의 방향을 가리키고 가운데 손가락은 z 축의 양의 방향을 가리 킵니다).
전용 I2C 센서 버스를 사용하여 MPU-6050은 외부 3 축 Compass에서 직접 입력을 수신하여 전체 9 축 MotionFusion ™ 출력을 제공합니다.결합 된 자이로 스코프와 가속기 타임 라인 사이의 불일치 문제를 제거하고 다중 성분 솔루션에 비해 포장 공간을 크게 줄입니다.3 축 자력계에 연결된 경우 MPU-60X0은 메인 I2C 또는 SPI 포트에 전체 9 축 운동 융합 출력을 제공 할 수 있습니다 (SPI 포트는 MPU-6000에서만 사용할 수 있음).
대안 및 이와 동등한 요소
• MPU-3300
• MPU-6000
• MPU-6500
MPU-6050의 제조업체
MPU-6050의 제조업체는 TDK입니다.TDK의 두 창립자 인 Yogoro Kato 박사와 Takei Takei는 도쿄에서 페라이트를 발명 한 후 도쿄 Denkikagaku Kogyo K.K를 설립했습니다.1935 년에 글로벌 전자 산업 브랜드로서 TDK는 항상 전자 원료 및 전자 부품 분야에서 지배적 인 위치를 유지해 왔습니다.TDK의 포괄적이고 혁신 중심의 제품 포트폴리오는 세라믹 커패시터, 알루미늄 전해 커패시터, 필름 커패시터, 자석 부품, 고주파 성분, 압전 및 보호 장치 (예 : 온도 및 압력)와 같은 수동적 구성 요소를 포함합니다.자기 및 MEMS 센서 등. 또한 TDK는 전원 공급 장치 및 에너지 장치, 자기 헤드 및 기타 제품도 제공합니다.제품 브랜드에는 TDK, EPCOS, Invensense, Micronas, Tronics 및 TDK-Lambda가 포함됩니다.
MPU-6050의 내부 블록 다이어그램
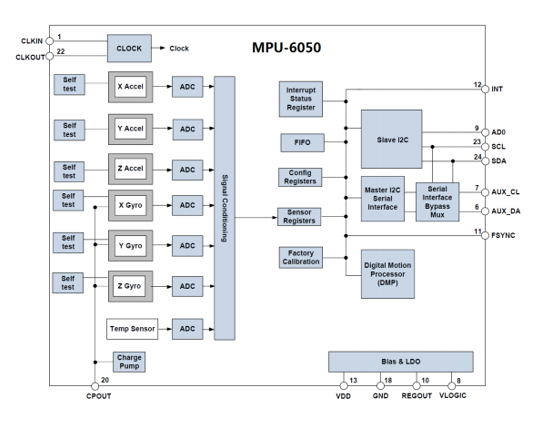
그 중 SCL과 SDA는 MCU에 연결된 IIC 인터페이스이며 MCU는이 IIC 인터페이스를 통해 MPU-6050을 제어합니다.IIC 인터페이스, 즉 aux_cl 및 aux_da도 있습니다.이 인터페이스는 자기 센서와 같은 외부 슬레이브 장치를 연결하여 9 축 센서를 형성하는 데 사용될 수 있습니다.Vlogic은 IO 포트 전압입니다.이 핀은 최소 1.8V를 지원할 수 있습니다.우리는 보통 VDD에 직접 연결합니다.AD0은 슬레이브 IIC 인터페이스의 주소 제어 핀입니다 (MCU에 연결).이 핀은 IIC 주소의 가장 낮은 비트를 제어합니다.GND에 연결된 경우 MPU-6050의 IIC 주소는 0x68입니다.VDD에 연결된 경우 0x69입니다.여기의 주소에는 가장 낮은 비트의 데이터 전송이 포함되어 있지 않습니다 (가장 낮은 비트는 읽기 및 쓰기 작업을 나타내는 데 사용됩니다).MWBalancedSTC15에서 AD0은 GND에 연결되므로 MPU-6050의 IIC 주소는 0x68입니다 (가장 낮은 비트 제외).
IIC 인터페이스를 초기화하십시오
MPU-6050은 IIC를 사용하여 STC15와 통신하므로 먼저 MPU-6050에 연결된 SDA 및 SCL 데이터 라인을 초기화해야합니다.
MPU-6050을 재설정합니다
이 단계는 MPU-6050 내부의 모든 레지스터를 기본값으로 복원하며, 이는 전원 관리 레지스터 1 (0x6b)의 1 ~ 비트 7을 작성하여 달성됩니다.재설정 후 전원 관리 레지스터 1은 기본값 (0x40)으로 복원되며,이 레지스터는 MPU-6050을 깨우고 정상적인 작업 상태에 넣기 위해 0x00으로 설정해야합니다.
각도 속도 센서 (자이로) 및 가속 센서의 본격적인 범위를 설정하십시오.
이 단계에서는 각각 자이로 스코프 구성 레지스터 (0x1b)와 가속 센서 구성 레지스터 (0x1c)를 통해 두 센서의 전체 스케일 범위 (FSR)를 설정했습니다.일반적으로, 우리는 자이로 스코프의 본격적인 범위를 ± 2000dps로 설정하고 가속도계의 본격적인 범위를 ± 2g로 설정했습니다.
다른 매개 변수를 설정합니다
여기에서는 다음 매개 변수를 구성해야합니다. 인터럽트를 끄고, AUX I2C 인터페이스를 비활성화하고, FIFO를 비활성화하고, 자이로 스코프 샘플링 속도를 설정하고, DLPF (Digital Low-Pass Filter)를 구성합니다.이 장에서는 인터럽트를 사용하지 않기 때문에 인터럽트 기능을 끄려면 인터럽트 기능이 꺼져 있어야합니다.동시에, 다른 외부 센서를 연결하기 위해 AUX I2C 인터페이스를 사용하지 않으므로이 인터페이스를 닫아야합니다.이러한 기능은 인터럽트 활성화 레지스터 (0x38) 및 사용자 제어 레지스터 (0x6A)를 통해 제어 할 수 있습니다.MPU-6050은 FIFO를 사용하여 센서 데이터를 저장할 수 있지만이 장에서는 사용하지 않았으므로 모든 FIFO 채널을 닫아야합니다.이것은 FIFO ENABLE 레지스터 (0x23)를 통해 제어 할 수 있습니다.기본적 으로이 레지스터의 값은 0이므로 (즉, FIFO가 비활성화 됨) 기본값을 직접 사용할 수 있습니다.자이로 스코프의 샘플링 속도는 샘플링 속도 분배기 레지스터 (0x19)에 의해 제어됩니다.일반적 으로이 샘플링 속도를 50으로 설정합니다. DLPF (Digital Low-Pass Filter)의 구성은 구성 레지스터 (0x1A)를 통해 완료됩니다.일반적으로 데이터 정확도와 응답 속도의 균형을 맞추기 위해 DLPF를 대역폭의 절반으로 설정합니다.
시스템 클록 소스를 구성하고 각속도 센서 및 가속 센서를 활성화합니다.
시스템 클록 소스의 설정은 전원 관리 레지스터 1 (0x6b)에 따라 다르며, 여기서이 레지스터의 가장 낮은 3 비트는 클록 소스의 선택을 결정합니다.기본적 으로이 3 비트는 0으로 설정되어있어 시스템이 내부 8MHz RC 발진기를 클럭 소스로 사용합니다.그러나 시계 정확도를 향상시키기 위해 종종 1로 설정하고 x 축 자이로 스코프 PLL을 클록 소스로 선택합니다.또한 각속도 센서 및 가속 센서를 활성화하는 것도 초기화 프로세스에서 중요한 단계입니다.두 작업 모두 전원 관리 레지스터 2 (0x6c)를 통해 구현됩니다.해당 센서를 활성화하기 위해 해당 비트를 0으로 설정하기 만하면됩니다.위의 단계를 완료 한 후 MPU-6050은 정상적인 작업 상태를 입력 할 수 있습니다.특별히 설정되지 않은 레지스터는 시스템별로 사전 설정된 기본값을 채택합니다.
MPU-6050은 어떻게 작동합니까?
자이로 센서
센서에는 자이로 내부가 장착되어 있으며, 이로 스코프 효과로 인해 항상 초기 방향과 평행하게 유지됩니다.따라서, 우리는 초기 방향에서 자이로의 편차를 감지하여 방향과 회전 각도를 계산할 수 있습니다.
가속도계 센서
가속도계 센서는 가속도를 측정 할 수있는 장치이며 압전 효과의 원리에 따라 작동합니다.가속 동안 센서는 질량 블록에 적용된 관성력을 측정 한 다음 Newton의 제 2 법칙을 사용하여 가속도 값을 계산합니다.
디지털 모션 프로세서 (DMP)
DMP는 MPU6050 칩의 데이터 처리 모듈로, 자이로 스코프 및 가속도계 센서에서 데이터를 획득하고 출력 쿼터니언을 처리하기위한 Kalman 필터링 알고리즘이 내장되어 있습니다.이 기능은 주변 마이크로 프로세서의 워크로드를 크게 줄이고 지루한 필터링 및 데이터 융합 프로세스를 피합니다.
참고 :
Quaternions : Quaternions는 단순한 supercomplex 숫자입니다.복소수는 실수와 가상 단위 I로 구성되며 여기서 i^2 = -1.
MPU-6050은 어디에 사용됩니까?
• 장난감
• 핸드셋 및 휴대용 게임
• 모션 기반 게임 컨트롤러
• Blurfree ™ 기술 (비디오/정지 이미지 안정화 용)
• AirSign ™ 기술 (보안/인증 용)
• Instantgesture ™ IG ™ 제스처 인식
• 건강, 피트니스 및 스포츠를위한 웨어러블 센서
• 모션 지원 게임 및 응용 프로그램 프레임 워크
• MotionCommand ™ 기술 (제스처 바로가 붙음)
• 위치 기반 서비스, 관심 지점 및 사망자 계산
• 인터넷에 연결된 DTV 및 셋톱 박스 용 3D 원격 제어, 3D 마우스
• Touchanywhere ™ 기술 ( "No T
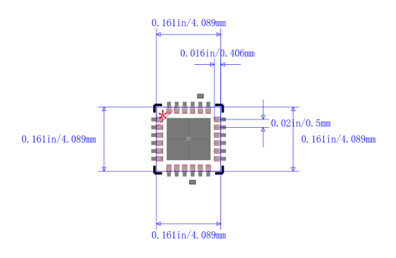
MPU-6050의 패키지
MPU-6050의 노이즈를 줄이는 방법은 무엇입니까?
MPU-6050의 소음을 줄이기 위해 다음과 같은 방법을 사용할 수 있습니다.
교정 센서 사용 : MPU-6050의 가속도계와 자이로 스코프를 보정하면 센서 자체의 편향과 오류가 제거되어 노이즈의 영향이 줄어 듭니다.교정 프로세스는 일반적으로 정적 교정과 모션 교정의 두 단계로 구성됩니다.
하드웨어 필터링 프로세스 : MPU-6050의 전원 라인에 필터 커패시터를 추가하면 전원 공급 장치 노이즈가 센서에 미치는 영향을 줄일 수 있습니다.한편, PCB 레이아웃 중에는 MPU-6050을 고주파 신호 라인 및 고전력 구성 요소와 같은 잠재적 인 간섭 소스에서 멀리 떨어 뜨려야합니다.
소프트웨어 필터링 처리 : MPU-6050에서 원시 데이터를 수집 한 후 소프트웨어 필터링 링크를 추가하여 초기 데이터를 사전 프로세스하여 노이즈로 인한 간섭을 제거 할 수 있습니다.일반적으로 사용되는 소프트웨어 필터링 방법에는 평균 필터링, 중간 필터링, Kalman 필터링 등이 포함됩니다.
내부 저역 통과 필터 사용 : MPU-6050에는 내부 통합 디지털 저역 통과 필터가있어 컷오프 주파수를 설정하여 고주파 노이즈를 줄이는 데 사용할 수 있습니다.구체적으로, A/D 샘플링으로 인한 고주파 노이즈를 제거하기 위해 MPU-6050의 구성 레지스터를 수정하여 디지털 필터의 컷오프 주파수를 설정할 수 있습니다.
MPU-6050 기반 모션 궤적 계산
MPU-6050은 물체의 움직임과 태도를 측정하는 데 사용할 수있는 6 축 가속도계와 자이로 스코프 센서입니다.MPU-6050을 기반으로 한 모션 궤적 계산은 다음 단계로 실현 될 수 있습니다.
첫 번째 단계는 센서 데이터를 읽는 것입니다.적절한 드라이버 및 라이브러리 기능을 사용하여 MPU-6050 센서의 가속도계 및 자이로 스코프 데이터를 읽어야합니다.이 데이터는 일반적으로 디지털 형식으로 출력되므로 일부 변환 및 교정 작업은 물리적 단위의 실제 측정으로 변환해야합니다.
두 번째 단계는 가속도를 계산하는 것입니다.먼저, 각 축에서 물체의 가속도를 도출하려면 가속도계에서 데이터를 처리해야합니다.그 후, 각 축에서 물체의 속도와 변위를 계산하려면 가속 데이터를 통합해야합니다.Euler의 방법 또는 Lunger-Kutta 방법과 같은 수치 적 통합 기술은 종종이 프로세스에서 변위 계산의 정확성을 보장하기 위해 사용됩니다.
세 번째 단계는 각속도를 계산하는 것입니다.자이로 스코프 데이터를 사용하여 각 축에서 물체의 각속도를 계산할 수 있습니다.다시,이 데이터는 실제 물리적 단위에서 각속도를 얻기 위해 교정 및 변환해야합니다.
네 번째 단계는 회전을 계산하는 것입니다.각속도 데이터를 통합하여 각 축에서 물체의 회전 각도를 계산할 수 있습니다.이것은 Euler의 방법 또는 Longe-Kutta 방법과 같은 수치 적분 기술을 사용하여 각도를 계산할 수 있습니다.
다섯 번째 단계는 데이터를 병합하는 것입니다.우리는 가속도계와 자이로 스코프의 데이터를 결합하여 대상의 완전한 태도와 위치 정보를 얻습니다.이것은 Quaternion 기반 태도 솔버 또는 Euler Angle Solver와 같은 알고리즘을 사용하여 수행 할 수 있습니다.
여섯 번째 단계는 결과를 시각화하는 것입니다.우리는 계산 된 객체 모션 궤적을 3D 좌표계의 일련의 지점으로 변환하고 객체의 모션 궤적 및 태도 변화에 대한보다 직관적 인 이해를 위해 적절한 시각화 도구를 사용하여 표시합니다.
자주 묻는 질문 [FAQ]
1. MPU6050은 얼마나 정확합니까?
획득 한 결과는 엘리베이터 샤프트의 적절한 치수와 리프트 산업의 높은 표준을 보장하여 1 % 미만의 충분한 정확도와 신뢰성을 보여주었습니다.
2. MPU6050에서 데이터를 읽는 방법은 무엇입니까?
내부 MPU6050 레지스터를 읽으려면 마스터는 시작 조건을 보낸 다음 I2C 슬레이브 주소와 쓰기 비트를 보낸 다음 레지스터 주소를 읽습니다.
3. MPU6050은 어디에 사용됩니까?
웨어러블 건강 추적, 피트니스 추적 장치.드론 및 쿼드 콥터에서 MPU6050은 위치 제어에 사용됩니다.로봇 팔을 제어하는 데 사용됩니다.손 제스처 제어 장치.
4. MPU6050은 IMU입니까?
MPU6050 IMU 센서 블록은 하드웨어에 연결된 MPU-6050 센서의 데이터를 읽습니다.블록은 센서 축을 따라 가속, 각도 속도 및 온도를 출력합니다.
5. MPU6050의 처리는 무엇입니까?
이것은 가속도계와 자이로 스코프에서 나오는 데이터를 결합한 MPU6050의 온보드 프로세서입니다.DMP는 MPU6050을 사용하는 열쇠이며 나중에 자세히 설명합니다.모든 마이크로 프로세서와 마찬가지로 DMP는 실행하려면 펌웨어가 필요합니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.

LM317에 대한 심층 안내서 : 조정 가능한 전압 조정기 이해
9월3일에서
TL431 이해 : 정밀 션트 레귤레이터에 대한 포괄적 인 안내서
9월3일에서
인기있는 게시물
-
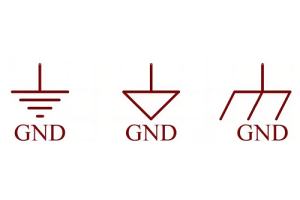
회로에서 GND는 무엇입니까?
1월1일에서 3108
-

RJ-45 커넥터 가이드 : RJ-45 커넥터 색상 코드, 배선 체계, R-J45 응용 프로그램, RJ-45 데이터 시트
1월1일에서 2672
-
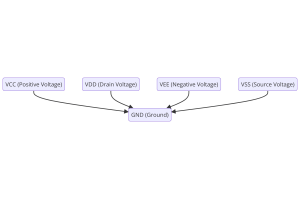
전자 제품 VCC, VDD, VEE, VSS 및 GND의 전원 공급 장치 이해
11월15일에서 2211
-

파이버 커넥터 유형 : SC 대 LC 및 LC 대 MTP
1월1일에서 2182
-

DB9와 RS232의 비교
1월1일에서 1802
-

LR44 배터리는 무엇입니까?
유비쿼터스 힘 인 전기는 사소한 기기에서 생명을 위협하는 의료 장비에 이르기까지 일상 생활의 모든 측면에 조용히 스며 들어 침묵하는 역할을합니다.그러나이 에너지, 특히 저장하고 효율적으로 출력하는 방법을 진정으로 파악하는 것은 쉬운 일이 아닙니다.이 기사는 표면에 중요하지 않은 것처럼 보일 수 있지만 실제 응용 분야, 즉 LR44 배터리에서 매우 다재다능한 코인 셀 배터리 유형에 초점을 맞출 것입니다.이 기사는 ...1월1일에서 1774
-
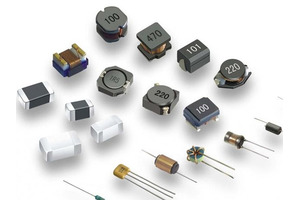
기본 이해 : 인덕턴스 저항 및 정관
전기 공학의 복잡한 춤에서, 기본 요소의 트리오는 인덕턴스, 저항 및 커패시턴스와 같은 중심 단계를 차지합니다.각각은 전자 회로의 역동적 인 리듬을 지시하는 독특한 특성을 나타냅니다.여기서 우리는 이러한 구성 요소의 복잡성을 해독하고 광대 한 전기 오케스트라 내에서 뚜렷한 역할과 실용적인 용도를 발견하기위한 여정을 시작합니다.자기 플럭스 마법사와 함께 인덕턴스;저항, 전류 흐름의 확고한 게이트 키퍼;그리고 ...1월1일에서 1728
-

CR2430 배터리 종합 가이드 : 사양, 응용 프로그램 및 CR2032 배터리 비교
CR2430 배터리는 무엇입니까?CR2430 배터리의 이점표준CR2430 배터리 애플리케이션CR2430 동등한CR2430 대 CR2032배터리 CR2430 크기CR2430 및 이와 동등한 것을 구입할 때 찾아야 할 사항데이터 시트 PDF자주 묻는 질문 배터리는 소형 전자 장치의 핵심입니다.사용 가능한 많은 유형 중에서 코인 셀은 일반적으로 계산기, 리모컨 및 시계에서 발견되는 중요한 역할을합니다.작은 크기에도 불구하고 각 코인 셀에는 독특한 장점이 ...1월1일에서 1673
-
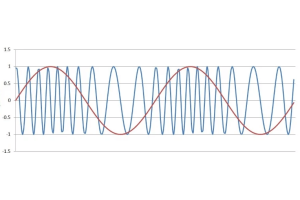
RF는 무엇이며 왜 우리는 그것을 사용합니까?
무선 주파수 (RF) 기술은 현대 무선 통신의 핵심 부분으로, 물리적 연결없이 장거리에 걸쳐 데이터 전송을 가능하게합니다.이 기사는 RF의 기본 사항을 탐구하여 전자기 방사선 (EMR)이 RF 커뮤니케이션을 가능하게하는 방법을 설명합니다.우리는 EMR의 원칙, RF 신호의 생성 및 제어 및 광범위한 사용을 탐구 할 것입니다.이 기사는 또한 RF 기술의 역사적 이정표, 관련된 기술 과제 및 안정적인 RF 커뮤니케이션을 보장하는 데 ...1월1일에서 1670
-
트랜지스터의 HFE에 대한 포괄적 인 가이드
트랜지스터는 최신 전자 장치의 중요한 구성 요소로 신호 증폭 및 제어를 가능하게합니다.이 기사는 트랜지스터의 HFE 값을 선택하는 방법, HFE 찾기 방법 및 다양한 유형의 트랜지스터의 이득을 포함하여 HFE를 둘러싼 지식을 탐구합니다.우리는 HFE를 탐색함으로써 트랜지스터의 작동 방식과 전자 회로에서의 역할에 대한 더 깊은 이해를 얻습니다. 목록 트랜지스터의 HFE는 무엇입니까? 트랜지스터의 HFE를 계산하는 방법은 무...11월15일에서 1632
핫 부품 번호
-

LM3824MMX-1.0
Texas Instruments
IC CURRENT GAUGE 3% 8VSSOP
SN54LS173AJ
Texas Instruments
54LS173A 4-BIT D-TYPE REGISTERS
74AC109SC
Fairchild Semiconductor
IC FF JK TYPE DUAL 1BIT 16SOIC
EPF10K50EQI240-2N
Intel
IC FPGA 189 I/O 240QFP
FDP050AN06A0
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 1
ADM8830ACP
Analog Devices Inc.
IC CHARGE PUMP REG TFT 20LFCSP
Z8F021APJ020SG
Zilog
IC MCU 8BIT 2KB FLASH 28DIP
SPC58EC80E1Q0C0X
STMicroelectronics
IC MCU 32BIT 4MB FLASH 64ETQFP
NZT902
onsemi
TRANS NPN 90V 3A SOT223-4
EDZVFHT2R16B
Rohm Semiconductor
DIODE ZENER 16V 150MW EMD2
UC3853D
Texas Instruments
IC PFC CTR AVER CURR 94KHZ 8SOIC
MB9AF112KQN-G-AVE2
Cypress Semiconductor
IC MCU 32BIT 160KB FLASH 48QFN
DRV5015A1QDBZT
Texas Instruments
MAGNETIC SWITCH LATCH SOT23-3
TPS7A2430DBVR
Texas Instruments
IC REG LINEAR 3V 200MA SOT23-5
NCP1589DMNTWG
onsemi
IC REG CTRLR BUCK 10DFN
MMA02040C1821FB000
Vishay Beyschlag/Draloric/BC Components
RES 1.82K OHM 1% 2/5W MELF 0204
10118242-001RLF
Amphenol ICC (FCI)
CONN RCP MICRO HDMI 19POS SMD RA
NUF6402MNT1G
onsemi
FILTER RC(PI) 100 OHM/17PF SMD -

MAX923CPA+
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 2 W/VOLT REF 8DIP
SL28506BZC-2
Skyworks Solutions Inc.
IC CLOCK CK505 PCIE GEN2 56TSSOP
AD8417BRMZ-RL
Analog Devices Inc.
IC CURRENT SENSE 1 CIRCUIT 8MSOP
47CTQ020S
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 20V D2PAK
LT1678CS8#TRPBF
Analog Devices Inc.
IC OPAMP GP 2 CIRCUIT 8SO
TLC3704CN
Texas Instruments
IC COMPARATOR 4 GEN PUR 14DIP
W1524LC300
IXYS
DIODE GEN PURP 3KV 1524A W4
2225HA681KAT1A
KYOCERA AVX
CAP CER 680PF 3KV NP0 2225
TPS2041BDBVR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 SOT23-5
RMPA0959
Fairchild Semiconductor
IC RF AMP CELL 824-849MHZ 11LCC
SMCJ16CA-E3/57T
Vishay General Semiconductor - Diodes Division
TVS DIODE 16VWM 26VC DO214AB
SN74CBT3125PWR
Texas Instruments
IC BUS SWITCH 1 X 1:1 14TSSOP
ACT412US-T
Active-Semi
IC OFF-LINE SWITCH PWM 6SOT-23
VNB14NV0413TR
STMicroelectronics
IC PWR DRIVER N-CHAN 1:1 D2PAK
C1608X7R2A102M/10
TDK Corporation
CAP CER 1000PF 100V X7R 0603
MAX4699EGE
Analog Devices Inc./Maxim Integrated
IC SW DPDT-NO/NCX2 40OHM 16QFN
EPM3128ATC100-5
Intel
IC CPLD 128MC 5NS 100TQFP
W25Q16BVZPIG
Winbond Electronics
IC FLASH 16MBIT SPI/QUAD 8WSON -

RT0603DRD073K6L
YAGEO
RES SMD 3.6K OHM 0.5% 1/10W 0603
S-1112B33PI-L6STFG
ABLIC Inc.
IC REG LINEAR 3.3V 150MA SNT6A
THS6226AIRHBT
Texas Instruments
IC TELECOM INTERFACE 32VQFN
SSF2300
Good-Ark Semiconductor
MOSFET, N-CH, SINGLE, 4.5A, 20V,
SBR20A100CT
Diodes Incorporated
DIODE ARRAY SBR 100V 10A TO220AB
93LC46B-I/MS
Microchip Technology
IC EEPROM 1KBIT MICROWIRE 8MSOP
74HCT1G14GV,125
Nexperia USA Inc.
IC INVERT SCHMITT 1CH 1-IN SC74A
PIC16F882T-I/SS
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 28SSOP
ISL81487LIB
Intersil
IC TRANSCEIVER HALF 1/1 8SOIC
UPD78F0511AGB-GAF-AX
Renesas Electronics America Inc
IC MCU 8BIT 16KB FLASH 44LQFP
V24C12C50BL2
Vicor Corporation
DC DC CONVERTER 12V 50W
PCM1737E/2K
Texas Instruments
IC DAC/AUDIO 24BIT 200K 28SSOP
CY7C66113C-PVXC
Infineon Technologies
IC MCU 8K USB HUB 4 PORT 56TSSOP
V24B15H200BG3
Vicor Corporation
DC DC CONVERTER 15V 200W
AB-13.560MANH-T
TXC CORPORATION
CRYSTAL 13.5600MHZ 15PF SMD
ISL3172EIBZ
Renesas Electronics America Inc
IC TRANSCEIVER HALF 1/1 8SOIC
KSZ9131RNXC
Microchip Technology
IC TXRX FULL/HALF 4/4 48QFN
12062C223MAT2A
KYOCERA AVX
CAP CER 0.022UF 200V X7R 1206