TB6600HG 스테퍼 모터 드라이버 : 사양, 기능 및 응용 프로그램
목록
TB6600HG 설명

TB6600HG PWM 헬리콥터 유형 단일 칩 바이폴라 정현파 마이크로 스핑 모터 드라이버입니다.2 상, 1-2 상, W1-2 상, 2W1-2 상 및 4W1-2 상 여기 모드를 통한 전방 및 역 회전 제어를 달성 할 수 있습니다.2 상 바이폴라 스테퍼 모터는 저진, 고효율 시계 신호에 의해서만 구동됩니다.
대안 및 이와 동등한 점 :
• TB6600FG
• l6258ex
TB6600HG의 사양
• 부품 상태 : 활성
• 포장 : 트레이
• 패키지 / 케이스 : HZIP-25
• 제조업체 : Toshiba
• 운영 공급 전류 : 4.2 MA
• 작동 공급 전압 : 2V ~ 5.5 V
•로드 전압 등급 : 8V ~ 42 V
• 출력 수 : 2 개의 출력
• PD- 전력 소실 : 40 W.
• 장착 스타일 : 구멍을 통해
• 패키지 길이/너비/높이 : 29.3mm (최대) /4.5mm/15.7mm
• 제품 범주 : 모터 / 모션 / 점화 컨트롤러 및 드라이버
TB6600HG의 작동 조건
(TA = -30 ° C ~ 85 ° C)
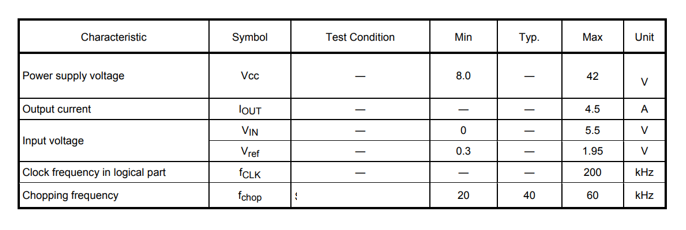
참고 : 두 개의 VCC 터미널을 동일한 전압으로 프로그래밍해야합니다.출력 전류가 전력 소실 PD에 의해 제한되기 때문에 운영 범위의 최대 전류를 다양한 조건에 따라 반드시 수행 할 수는 없습니다.온도가 TJ (Avg.) = 107 ° C를 초과하는 조건에서 IC를 사용하지 마십시오.
42V의 전원 공급 전압 및 4.5A의 출력 전류는 작동 범위의 최대 값입니다.IC의 전원 공급 장치 변화, 외부 저항 및 전기적 특성을 고려 하여이 범위 내에서 충분히 기울어 진 회로를 설계하십시오.42V의 전원 공급 전압 및 4.5A의 출력 전류를 초과하는 경우 IC는 정상적으로 작동하지 않습니다.
TB6600HG를 제어 시스템에 연결하는 방법은 무엇입니까?
전원 연결 : 먼저 TB6600HG에 적절한 전원 공급 장치를 제공하십시오.TB6600HG에 전원을 공급할 때는 일반적으로 VCC (양의 전원 공급 장치)와 GND (그라운드 와이어)의 두 핀을 연결해야합니다.VCC 핀은 칩을 구동하는 데 필요한 전압을 제공하는 반면 GND 핀은 기준지면으로 사용됩니다.전원 공급 장치가 안정적이고 TB6600HG의 사양을 충족해야합니다.
신호 연결 : 제어 시스템의 특정 요구에 따라 제어 신호를 TB6600HG 드라이버 칩의 해당 핀에 연결해야합니다.이러한 제어 신호에는 일반적으로 방향 제어 신호 및 단계 펄스 신호 등이 포함되며, 여기에는 회전 방향 및 회전 속도를 포함하여 모터가 어떻게 작용하는지 지시합니다.
모터 연결 : 모터를 TB6600HG 드라이버 칩에 연결할 때 특히주의해야합니다.모터의 두 와이어 (일반적으로 빨간색과 검은 색)는 각각 모터의 양 및 음수 극을 나타냅니다.빨간색 와이어는 일반적으로 모터의 양극 단자에 연결되는 반면 검은 와이어는 네거티브 터미널에 연결됩니다.
피드백 연결 (선택 사항) : 인코더를 피드백 제어에 사용하는 경우 인코더의 출력 신호를 제어 시스템에 연결해야합니다.여기에는 일반적으로 상 A, 상 B 및 상 Z (사용 가능한 경우)의 출력이 포함됩니다.
접지 : 간섭과 손상을 피하기 위해 모든 장비의 공통 접지선이 올바르게 연결되어 있는지 확인해야합니다.
초기화 설정 : 연결이 완료되면 TB6600HG의 설정을 초기화하여 올바르게 작동하는지 확인해야합니다.여기에는 현재 한도 설정, 스텝핑 모드 등이 포함될 수 있습니다.
TB6600HG 제품 기능
• 확대 된 라디에이터를 채택하여 열 소산이 잘 소비됩니다
• 세분 설정 지침은 보드 뒷면에 인쇄됩니다.
• 출력 단락 보호 기능, 걱정없이 사용
• 동기화 손실없이 고속을 보장하기 위해 6N137 고속 광학 커플 링을 채택하십시오.
• 출력 전류는 다양한 애플리케이션 요구를 충족하도록 조정할 수 있습니다.
• 공통 애노드 입력 모드를 사용하면 두 개의 입력 터미널이있어 배선이 더 편리합니다.
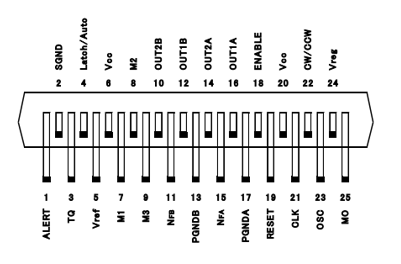
TB6600HG의 핀 구성
TB6600HG의 기능 설명
여기 설정
여기 모드는 M1, M2 및 M3 입력을 사용하여 다음 8 가지 모드에서 선택할 수 있습니다.모터 작동 중에 M1, M2 또는 M3 입력이 이동되면, 새로운 여기 모드가 초기 모드에서 시작하여 출력 전류 파형의 연속성을 방해 할 수 있습니다.
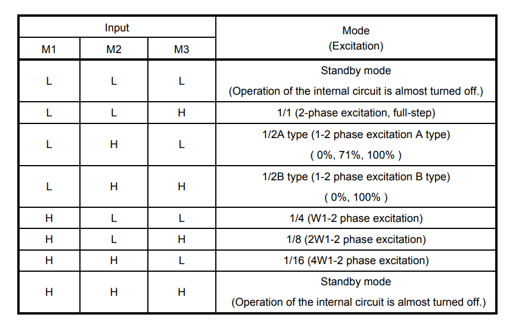
참고 : M1, M2 및 M3을 변경하여 흥미 진진한 모드를 변경하려면 M1 = M2 = M3 = L 또는 M1 = M2 = M3 = H를 설정하지 마십시오.
대기 모드
조작 모드는 조건 M1 = M2 = M3 = L 또는 M1 = M2 = M3 = H 조건 하에서 대기 모드로 이동합니다. 전력 소비는 작동 보호를 제외한 모든 작업을 끄면 최소화됩니다.대기 모드에서는 출력 터미널 Mo가 Hz입니다.대기 모드는 m1 = m2 = m3 = l, m1 = m2 = m3 = h의 상태를 다른 상태로 변경하여 해제됩니다.대기 모드를 방출 한 후 입력 신호는 약 200 μs에 대해 허용되지 않습니다.
붕괴 모드
PWM 모드에서 전류를 충전하고 배출하려면 일반적으로 OSCM에서 약 5 회 사이클이 필요합니다.40 % 빠른 붕괴 모드는 빠른 붕괴 모드의 최종 두 사이클 내에서 붕괴를 유도함으로써 시작되며, 40 %의 비율은 일관되게 고정되어 있습니다.마스터 클록 주파수 (FMCLK), OSCM 주파수 (FOSCM) 및 PWM 주파수 (FCHOP) 사이의 관계는 다음과 같이 표시됩니다.
foscm = 1/20 × fmclk
fchop = 1/100 × fmclk
ROSC = 51KΩ, 마스터 클럭 = 4MHz, OSCM = 200kHz, PWM (FCHOP) = 40kHz의 주파수.
초기 모드
재설정을 사용하면 위상 전류는 다음과 같습니다.
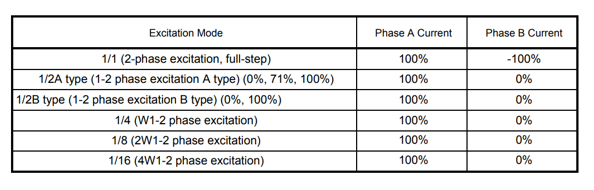
현재 방향은 다음과 같이 정의됩니다.
out1a → out2a : 전방 방향
Out1b → Out2b : 전방 방향
TB6600HG의 적용
아래에는 TB6600HG의 일부 응용 프로그램이 나와 있습니다.
• 꼬리 조명
• 환대 건물
• 대형 실외 LED 디스플레이
• HID 조명에 대한 대안
• 산업용 하이 베이 조명
• 대형 LED 백라이트
• 디스플레이 LED 백라이트
• 카메라 지원 스마트 폰
• 스텝 업 또는 스텝 다운 드라이버 토폴로지
TB6600HG의 일반적인 결함 및 솔루션
다음은 TB6600HG에 대한 몇 가지 일반적인 결함과 해당 솔루션을 사용하여 결함이 발생할 때 빠른 조치를 취하고 장치의 정상 작동을 보호하는 데 도움이됩니다.
실패 1 : 드라이버 칩 과열
TB6600HG 칩 자체는 과도한 부하 또는 열 소산 조건이 열악하기 때문에 너무 뜨겁습니다.
해결책 : 열 소산을 향상시킵니다
드라이버 칩과 모터에 방열판이나 팬을 추가하여 일하는 동안 열을 완전히 소산 할 수 있도록해야합니다.동시에, 우리는 과열을 피하기 위해 운전자 칩과 모터 주위의 환경을 잘 통풍으로 유지해야합니다.
실패 2 : 모터가 잘못된 방향으로 회전합니다
모터가 구동 신호를 수신 한 후, 회전 방향은 예상과 일치하지 않으며, 제어 신호가 잘못되었거나 구동 칩이 제대로 구성되지 않을 수 있습니다.
해결책 : 제어 신호를 확인하십시오
방향 제어 신호 및 펄스 신호가 올바른지 확인하려면 TB6600HG로 전송 된 제어 신호를주의 깊게 확인해야합니다.마이크로 컨트롤러가 신호를 보내는 데 사용되는 경우 프로그램 코드 및 핀 구성을 확인하십시오.
실패 3 : 모터가 회전하지 못합니다
드라이브 신호를받은 후 모터가 응답하지 않으며 드라이버 칩이 제대로 작동하지 않거나 모터와 드라이버 칩 사이의 연결에 문제가있을 수 있습니다.
해결책 : 전원 공급 장치와 연결을 확인하십시오
TB6600HG의 전원 공급 장치가 정상이며 모터와 드라이버 칩 사이의 연결이 견고한지 확인해야합니다.멀티 미터를 사용하여 정상 범위에 있는지 확인하여 회로의 전압과 전류를 확인합니다.
실패 4 : 심각한 운동 가열
모터는 작동 중에 과도한 열을 생성하며, 이는 과도한 전류 또는 열악한 열 소산으로 인해 발생할 수 있습니다.
솔루션 : 현재 설정을 조정합니다
모터가 심각한 열을 생성하는 경우 드라이버 칩의 출력 전류를 줄이려고 노력할 수 있습니다.TB6600HG의 현재 설정 핀을 조정함으로써 출력 전류의 크기를 효과적으로 제한하여 모터의 부담을 줄이고 모터의 안정적이고 안전한 작동을 보장 할 수 있습니다.
자주 묻는 질문 [FAQ]
1. TB6600HG의 작동 온도 범위는 얼마입니까?
TB6600HG의 작동 온도는 -30 ° C ~ 85 ° C입니다.
2. TB6600HG는 무엇입니까?
TB6600HG는 CNC 머신, 3D 프린터, 로봇 공학 및 자동화 시스템과 같은 다양한 응용 분야에서 스테퍼 모터를 제어하도록 설계된 스테퍼 모터 드라이버의 한 유형입니다.
3. TB6600HG의 주요 특징은 무엇입니까?
TB6600HG 기능에는 조절 가능한 모터 전류, 스텝 해상도 설정, 내장 과열 보호 및 신호 제어를위한 광선 분리 입력이 포함됩니다.