스테퍼 모터 프로젝트의 경우 PIC16F877A 사용 안내서
PIC16F877A 마이크로 컨트롤러는 기능의 균형과 사용 편의성을 제공하기 때문에 많은 전자 프로젝트에서 널리 사용됩니다.이 안내서에서는 PIC16F877A를 자세히 살펴 보며 핀아웃 및 CAD 모델에서 스테퍼 모터 제어에 사용되는 모든 것을 다룹니다.간단한 장치 나 복잡한 자동화 프로젝트를 구축하든이 마이크로 컨트롤러를 사용하여 모터를 연결하고 제어하는 방법을 이해하면 최상의 결과를 얻을 수 있습니다.
목록

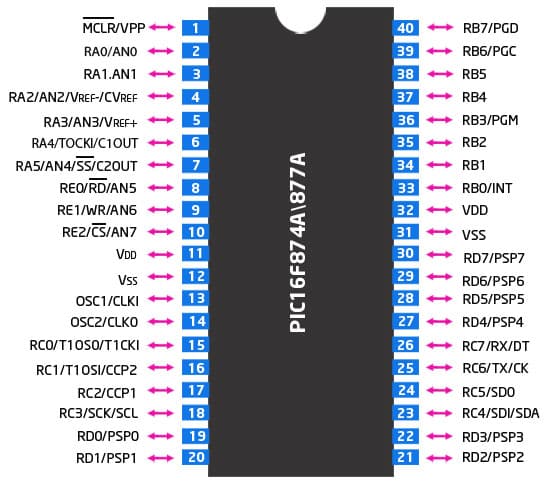
PIC16F877A 핀 구성
PIC16F877A에 대한 CAD 모델
PIC16F877A 다이어그램 기호
PIC16F877A PCB 발자국

3D 모델
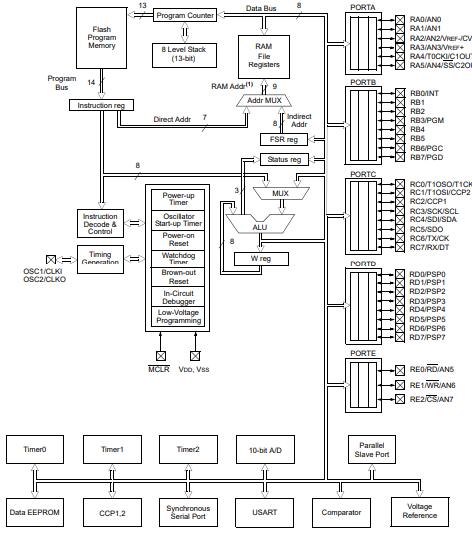
PIC16F877A 내부 구조
자세한 기술 사양
| 유형 | 매개 변수 |
| 공장 리드 타임 | 7 주 |
| 산 | 구멍을 통해 |
| 장착 유형 | 구멍을 통해 |
| 패키지 / 케이스 | 40-DIP (0.600, 15.24mm) |
| 핀 수 | 40 |
| 데이터 변환기 | A/D 8x10B |
| I/O의 수 | 33 |
| 워치 독 타이머 | 예 |
| 작동 온도 | -40°C ~ 85°C TA |
| 포장 | 튜브 |
| 시리즈 | 사진® 16f |
| 게시 | 1997 |
| JESD-609 코드 | E3 |
| pbfree 코드 | 예 |
| 부품 상태 | 활동적인 |
| 수분 감도 수준 (MSL) | 1 (무제한) |
| 종료 수 | 40 |
| ECCN 코드 | 귀 99 |
| 터미널 마감 | 무광택 주석 (SN) - 어닐링 |
| 추가 기능 | 4V 최소 공급으로 운영됩니다 |
| 터미널 위치 | 이중 |
| 공급 전압 | 5V |
| 빈도 | 20MHz |
| 기본 부품 번호 | PIC16F877A |
| 핀 수 | 40 |
| 공급 전압-맥스 (VSUP) | 5.5V |
| 전원 공급 장치 | 5V |
| 공급 전압 -Min (VSUP) | 4.5V |
| 인터페이스 | I2C, SPI, SSP, UART, USART |
| 메모리 크기 | 14KB |
| 발진기 유형 | 외부 |
| 공칭 공급 전류 | 1.6MA |
| 램 크기 | 368 x 8 |
| 전압 - 공급 (VCC/VDD) | 4V ~ 5.5V |
| UPS/UCS/주변 ICS 유형 | 마이크로 컨트롤러, RISC |
| 핵심 프로세서 | 사진 |
| 주변 장치 | 브라운 아웃 감지/재설정, POR, PWM, WDT |
| 프로그램 메모리 유형 | 플래시 |
| 핵심 크기 | 8 비트 |
| 프로그램 메모리 크기 | 14KB (8k x 14) |
| 연결성 | I2C, SPI, UART/USART |
| 비트 크기 | 8 |
| 액세스 시간 | 20 µ에스 |
| ADC가 있습니다 | 예 |
| DMA 채널 | 아니요 |
| 데이터 버스 너비 | 8b |
| 타이머/카운터 수 | 3 |
| 주소 버스 너비 | 8b |
| 밀도 | 112 KB |
| eeprom 크기 | 256 x 8 |
| CPU 가족 | 사진 |
| ADC 채널 수 | 8 |
| PWM 채널 수 | 2 |
| I2C 채널 수 | 1 |
| 키 | 4.06mm |
| 길이 | 52.45mm |
| 너비 | 14.22mm |
| SVHC에 도달하십시오 | SVHC 없음 |
| 방사선 경화 | 아니요 |
| ROHS 상태 | ROHS3 준수 |
| 무료로 리드 | 무료로 리드 |
스테퍼 모터 이해
스테퍼 모터는 전통적인 모터와 같은 연속 운동보다는 특정 단계로 움직이는 전기 모터 유형입니다.이러한 단계별 움직임은 적용에 따라 달라질 수있는 정도로 측정됩니다.
스테퍼 모터는 파동 드라이브, 풀 드라이브 및 하프 드라이브와 같은 다양한 모드로 작동 할 수 있습니다.각 모드는 모터 단계에 활력을주는 방법을 제어하여 성능에 영향을 미치며 다양한 용도에 적합합니다.
웨이브 드라이브 모드에서는 한 번에 모터의 한 단계 만 전반에 전원을 공급합니다.이 간단한 제어 모드는 최소 출발 전류가 필요한 기본 자동화 작업과 같이 토크보다 전력 효율이 우선 순위가 높은 상황에 유용합니다.
전체 드라이브 모드는 두 단계를 동시에 전원으로 전달합니다.이로 인해 두 코일이 함께 작동함에 따라 토크 출력이 높아져 로봇 공학 및 CNC 기계와 같이 정밀도와 강도가 필요한 응용 분야에 이상적입니다.
Half Drive Mode는 1 단계와 두 단계에 번갈아 가며 파도와 전체 드라이브의 특징을 결합합니다.이 접근법은 더 작은 단계 크기를 제공하여 모터 해상도를 효과적으로 두 배로 늘립니다.Half Drive는 3D 프린팅 및 미세 계측과 같은 응용 프로그램에 가장 적합합니다.
특정 용도로 스테퍼 모터를 선택할 때는 운영 환경을 고려하십시오.고정밀 작업의 경우 부드러운 전환 및 진동 감소를 보장하기 위해 Half Drive 모드가 권장됩니다.에너지 절약에 중점을 둔 프로젝트의 경우 웨이브 드라이브 모드가 더 적절할 수 있습니다.
올바른 모드를 선택하려면 토크, 속도 및 시스템 복잡성과 같은 균형 요소가 필요합니다.올바른 모드를 선택하면 모터의 성능과 시스템의 전반적인 효율에 큰 영향을 줄 수 있습니다.
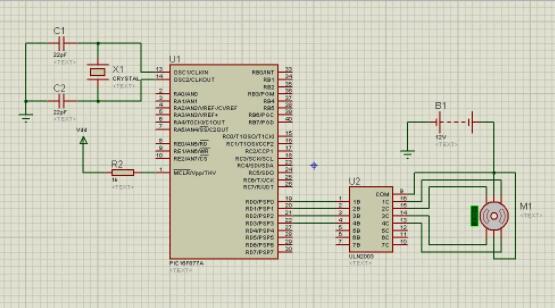
스테퍼 모터를 PIC16F877A로 연결합니다
스테퍼 모터를 a PIC16F877A 마이크로 컨트롤러, ULN2003 트랜지스터 어레이를 사용할 수 있습니다.고 토크 모터 용으로 설계된이 통합 회로에는 7 개의 달링턴 쌍이 포함되어 있습니다.마이크로 컨트롤러의 낮은 POTD 비트는 ULN2003의 입력 핀 (1B, 2B, 3B, 4B)에 연결되며 출력 핀 (1C, 2C, 3C, 4C)은 스테퍼 모터의 핀에 연결됩니다.모터의 공통 핀과 ULN2003의 COM 핀은 12V 전원 공급 장치에 연결되어 있습니다.
스테퍼 모터는 일반적으로 정확한 모션 제어가 필요한 응용 분야에 사용됩니다.디지털 펄스를 기계적 회전으로 변환하여 CNC 기계 및 3D 프린터와 같은 장치에 이상적이며 위치와 속도를 신중하게 조절해야합니다.
ULN2003은 고전류를 처리하는 능력과 마이크로 컨트롤러와의 쉬운 인터페이스 기능으로 인해 스테퍼 모터를 제어하는 데 중요한 역할을합니다.PIC16F877A에 연결될 때, 하부 포드 비트는 스테퍼 모터를 제어하는 데 사용됩니다.이 구성은 정확한 단계 제어를 제공하여 정확한 움직임 및 위치를 보장합니다.
모터 제어 설정에서 ULN2003을 사용하는 것은 실제 응용 분야에서 매우 신뢰할 수 있습니다.누락 된 단계 또는 잘못된 포지셔닝과 같은 문제를 최소화하여 전반적인 성능을 향상시키는 데 도움이됩니다.사용 데이터를 기반으로 정기적 인 유지 보수 및 교정은 모터 기능을 추가로 최적화하여 장기 안정성과 정확한 작동을 보장 할 수 있습니다.
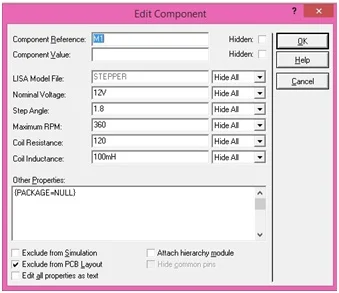
스테퍼 운동 속도 조정
Proteus 시뮬레이션 소프트웨어를 사용하여 스피퍼 모터 속도를 정확하게 수정할 수 있습니다.'편집 속성'을 통해 모터 설정에 액세스하면 단계 수 및 단계 각도와 같은 매개 변수에 대한 조정이 이루어질 수 있습니다.예를 들어, 200 단계 모터는 전체 회전 (360 °)을 200 단계로 분할하여 각 단계를 1.8 °로 렌더링합니다.Proteus에서 이러한 설정을 변경하면 시뮬레이션 중에 동적으로 반영됩니다.
실제로, 스테퍼 모터는 종종 CNC 기계 및 로봇 공학과 같이 운동의 정확한 제어가 중요한 산업에서 사용됩니다.스텝 각도와 단계 수를 조정하면 모터를 미세 조정하여 특정 작업에 필요한 정확한 움직임을 달성합니다.
스테퍼 모터 매개 변수 변경은 토크 및 해상도와 같은 성능 특성에 영향을 미칩니다.예를 들어, 단계 수를 늘리면 일반적으로 해상도가 향상되지만 토크와 응답 시간에 영향을 줄 수 있습니다.시뮬레이션을 통한 이러한 상충 관계를 이해하면 정보에 입각 한 결정을 내리는 데 도움이됩니다.
미묘한 관점은 반복 조정, 실질적인 시험이 뒤 따르는 것이 더 강력한 엔진 설계로 이어진다는 것을 보여줍니다.디지털 시뮬레이션이 실제 결과를 밀접하게 반영하는 것이 중요합니다.스테퍼 모터를 구성하는 뉘앙스는 실제로 이론적 정밀성과 실질적인 타당성 사이의 균형을 잡는 데 있습니다.
PIC16F877A로 스테퍼 모터를 프로그래밍합니다
이 섹션에서는 PIC16F877A 마이크로 컨트롤러를 사용하여 스테퍼 모터를 프로그래밍하는 방법을 다루고 다양한 구동 모드를 설명하고 효과적인 구현을위한 실질적인 지침을 제공합니다.
다음은 전체 드라이브 모드를 사용하여 스테퍼 모터 컨트롤을 보여주는 기본 예제 코드입니다.
void main ()
{
trisd = 0B00000000;// portd를 출력으로 설정합니다
portd = 0b11111111;// PORTD 초기화
하다
{
portd = 0B00000011;// 두 단계에 동시에 에너지를 전합니다
Delay_ms (500);// 0.5 초 지연
portd = 0b00000110;
Delay_ms (500);
portd = 0B00001100;
Delay_ms (500);
portd = 0B00001001;
Delay_ms (500);
} while (1);// 무기한 루프
}
이 코드에서는 PIC16F877A의 PORTD는 ULN2003 드라이버를 통해 스테퍼 모터를 제어하기위한 출력 포트로 구성됩니다.명령 시퀀스는 한 번에 스테퍼 모터의 두 단계에 활력을 불어 넣습니다. 이는 전체 구동 모드의 특징입니다.이 모드는 로터를 최대 토크로 고정 된 위치로 유지하지만 일반적으로 더 많은 전력을 소비합니다.
전체 구동 모드가 스테퍼 모터를 제어하는 유일한 방법은 아닙니다.웨이브 드라이브 및 하프 드라이브 모드는 특정 요구 사항에 따라 대안을 제공합니다.Wave Drive는 한 번에 하나의 단계만으로도 전력을 공급하여 전력 소비를 줄이지 만 토크가 더 낮습니다.하프 드라이브는 1 단계와 두 단계 사이를 번갈아 가며 높은 해상도와 부드러운 움직임을 제공합니다.
스테퍼 모터를 프로그래밍 할 때는 정확한 위치, 전력 효율 또는 최대 토크에 관계없이 요구에 가장 적합한 구동 모드를 선택하십시오.
스테퍼 모터의 실제 응용
스테퍼 모터는 정확한 제어와 안정적인 성능을 제공하는 능력 때문에 많은 산업에서 널리 사용됩니다.그들의 다양성은 자동차와 가정용 가전 제품부터 산업용 기계 및 의료 기기에 이르기까지 모든 것에 적합합니다.
자동차 세계에서 Stepper Motors는 스로틀, 헤드 라이트 및 에어컨과 같은 시스템을 제어하는 데 중요한 역할을합니다.그들은 이러한 구성 요소를 미세 조정하여 차량이 원활하고 효율적으로 운행하도록합니다.한편 프린터 및 복사기와 같은 사무 장비에서 스테퍼 모터는 종이 수유 및 잉크 배치와 같은 작업을 처리합니다.이 정밀도는 시간이 지남에 따라 일관된 인쇄 품질과 원활한 작동을 보장합니다.
집에서 세탁기 및 식기 세척기와 같은 가전 제품은 스테퍼 모터에 의존하여 물 흐름과 드럼 회전을 제어하여 모든 것이 매끄럽게 작동합니다.산업 환경에서 Stepper Motors는 CNC 기계 및 로봇 암을 작동하는 데 중요하며, 여기서 고정밀 제조에 필요한 정확한 움직임을 제공합니다.
보안 시스템은 또한 Stepper Motors의 신뢰할 수있는 움직임의 혜택을받습니다.감시 카메라 및 자동 잠금 장치와 같은 장치에서 Stepper Motors는 부드럽고 정확한 포지셔닝을 허용하므로 효과적인 모니터링 및 보안에 필수적입니다.건강 관리에서 Stepper Motors는 주입 펌프 및 이미징 장비와 같은 의료 기기에서 사용되며 안전하고 정확한 작동에 필요한 정확한 제어 기능을 제공합니다.
기술이 계속 발전함에 따라 Stepper Motors는 로봇 및 자율 주행 차량과 같은 새로운 분야에서 더 많은 응용 분야를 찾을 것으로 예상됩니다.그들의 지속적인 개발은 훨씬 더 정밀도와 효율성으로 이어져 다양한 산업에서의 역할을 확대 할 것입니다.
비슷한 마이크로 컨트롤러 부품
| 부품 번호 | pic16f877a-i/p | PIC16F77-I/P | PIC16F74-I/P | PIC16F777-I/P |
| 제조업체 | 마이크로 칩 기술 | 마이크로 칩 기술 | 마이크로 칩 기술 | 마이크로 칩 기술 |
| 패키지 / 케이스 | 40-DIP (0.600, 15.24mm) | 40-DIP (0.600, 15.24mm) | 40-DIP (0.600, 15.24mm) | 40-DIP (0.600, 15.24mm) |
| 핀 수 | 40 | 40 | 40 | 40 |
| 데이터 버스 너비 | 8 b | 8 b | 8 b | 8 b |
| I/O의 수 | 33 | 33 | 33 | 36 |
| 인터페이스 | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| 메모리 크기 | 14 KB | 7 KB | 14 KB | 14 KB |
| 공급 전압 | 5 v | 5 v | 5 v | 5 v |
| 주변 장치 | 브라운 아웃 감지/재설정, POR, PWM, WDT | 브라운 아웃 감지/재설정, POR, PWM, WDT | 브라운 아웃 감지/재설정, POR, PWM, WDT | 브라운 아웃 감지/재설정, POR, PWM, WDT |
| 비교보기 | pic16f877a-i/p 대 PIC16F77-I/P | pic16f877a-i/p 대 PIC16F77-I/P | pic16f877a-i/p 대 PIC16F74-I/P | pic16f877a-i/p 대 PIC16F777-I/P |
자주 묻는 질문 [FAQ]
1. 스테퍼 모터는 기계적 움직임을 생성하는 데 무엇을 사용합니까?
스테퍼 모터는 전기 펄스를 사용하여 기계적 움직임을 생성합니다.
2. 스테퍼 모터는 무엇을합니까?
스테퍼 모터는 개별 단계로 움직입니다.
3. 스테퍼 모터는 어떻게 측정됩니까?
스테퍼 모터는 각도로 측정됩니다.
4. 스테퍼 모터는 몇 단계를 차지합니까?
스테퍼 모터는 한 번에 한 단계 씩 움직입니다.
5. 스테퍼 모터에는 얼마나 많은 흥분 모드가 있습니까?
스테퍼 모터에는 세 가지 흥분 모드가 있습니다.
6. 스테퍼 모터를 연결하는 가장 간단한 방법은 무엇입니까?
가장 간단한 방법은 PIC16F877A 마이크로 컨트롤러에 연결하는 것입니다.
7. ULN2003의 입력 핀은 마이크로 컨트롤러의 가장 낮은 비트에 연결되어 있습니까?
4 개의 입력 핀
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
프로젝트를 위해 Adesto RM25C64DS-LTAI-B 메모리 칩을 선택하는 이유는 무엇입니까?
10월10일에서
PC817 Optocoupler : 기능 및 최신 응용 프로그램
10월10일에서
인기있는 게시물
-
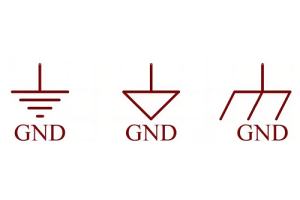
회로에서 GND는 무엇입니까?
1월1일에서 2838
-

RJ-45 커넥터 가이드 : RJ-45 커넥터 색상 코드, 배선 체계, R-J45 응용 프로그램, RJ-45 데이터 시트
1월1일에서 2409
-

파이버 커넥터 유형 : SC 대 LC 및 LC 대 MTP
1월1일에서 2019
-
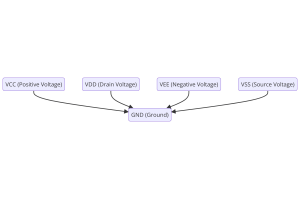
전자 제품 VCC, VDD, VEE, VSS 및 GND의 전원 공급 장치 이해
11월5일에서 1766
-

DB9와 RS232의 비교
1월1일에서 1726
-

LR44 배터리는 무엇입니까?
유비쿼터스 힘 인 전기는 사소한 기기에서 생명을 위협하는 의료 장비에 이르기까지 일상 생활의 모든 측면에 조용히 스며 들어 침묵하는 역할을합니다.그러나이 에너지, 특히 저장하고 효율적으로 출력하는 방법을 진정으로 파악하는 것은 쉬운 일이 아닙니다.이 기사는 표면에 중요하지 않은 것처럼 보일 수 있지만 실제 응용 분야, 즉 LR44 배터리에서 매우 다재다능한 코인 셀 배터리 유형에 초점을 맞출 것입니다.이 기사는 ...1월1일에서 1679
-
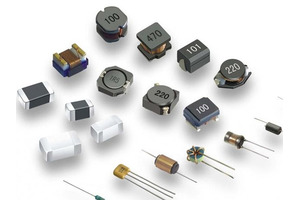
기본 이해 : 인덕턴스 저항 및 정관
전기 공학의 복잡한 춤에서, 기본 요소의 트리오는 인덕턴스, 저항 및 커패시턴스와 같은 중심 단계를 차지합니다.각각은 전자 회로의 역동적 인 리듬을 지시하는 독특한 특성을 나타냅니다.여기서 우리는 이러한 구성 요소의 복잡성을 해독하고 광대 한 전기 오케스트라 내에서 뚜렷한 역할과 실용적인 용도를 발견하기위한 여정을 시작합니다.자기 플럭스 마법사와 함께 인덕턴스;저항, 전류 흐름의 확고한 게이트 키퍼;그리고 ...1월1일에서 1621
-

CR2430 배터리 종합 가이드 : 사양, 응용 프로그램 및 CR2032 배터리 비교
CR2430 배터리는 무엇입니까?CR2430 배터리의 이점표준CR2430 배터리 애플리케이션CR2430 동등한CR2430 대 CR2032배터리 CR2430 크기CR2430 및 이와 동등한 것을 구입할 때 찾아야 할 사항데이터 시트 PDF자주 묻는 질문 배터리는 소형 전자 장치의 핵심입니다.사용 가능한 많은 유형 중에서 코인 셀은 일반적으로 계산기, 리모컨 및 시계에서 발견되는 중요한 역할을합니다.작은 크기에도 불구하고 각 코인 셀에는 독특한 장점이 ...1월1일에서 1495
-

CR2450 대 CR2032 : 대신 배터리를 사용할 수 있습니까?
리튬 망간 배터리는 다른 리튬 배터리와 유사합니다.높은 에너지 밀도와 긴 서비스 수명은 공통적 인 특성입니다.이러한 종류의 배터리는 고유 한 안전 때문에 많은 소비자의 신뢰와 호의를 얻었습니다.값 비싼 기술 가제트?우리 집의 작은 가전 제품?주위를 둘러 보면 어디에서나 볼 수 있습니다.이 많은 리튬-망간 배터리 중 CR2450 배터리와 CR2032 배터리는 특히 눈에 띄게됩니다.더 깊은 이해를 위해서는 차이점을 신중하게 ...1월1일에서 1471
-
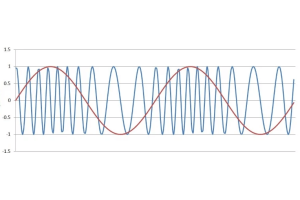
RF는 무엇이며 왜 우리는 그것을 사용합니까?
무선 주파수 (RF) 기술은 현대 무선 통신의 핵심 부분으로, 물리적 연결없이 장거리에 걸쳐 데이터 전송을 가능하게합니다.이 기사는 RF의 기본 사항을 탐구하여 전자기 방사선 (EMR)이 RF 커뮤니케이션을 가능하게하는 방법을 설명합니다.우리는 EMR의 원칙, RF 신호의 생성 및 제어 및 광범위한 사용을 탐구 할 것입니다.이 기사는 또한 RF 기술의 역사적 이정표, 관련된 기술 과제 및 안정적인 RF 커뮤니케이션을 보장하는 데 ...1월1일에서 1454
핫 부품 번호
-

P6KE30CA
Taiwan Semiconductor Corporation
TVS DIODE 25.6VWM 41.4VC DO15
LMJ316BB7226MLHT
Taiyo Yuden
CAP CER 22UF 10V X7R 1206
DZTA42-13
Diodes Incorporated
TRANS NPN 300V 0.5A SOT223-3
EP3SE80F780C3
Intel
IC FPGA 488 I/O 780FBGA
170M5884
Eaton - Bussmann Electrical Division
FUSE SQUARE 350A 690VAC RECT
TLF4277ELXUMA1
Infineon Technologies
IC PWR SPLY MONITR/OVRVLT 14SSOP
CY8C4126AXI-S445
Infineon Technologies
IC MCU 32BIT 64KB FLASH 64TQFP
MCP23S17-E/SS
Microchip Technology
IC XPNDR 10MHZ SPI 28SSOP
MAX6771TALD2+T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL 8TDFN
GRM1556T1H910JD01D
Murata Electronics
CAP CER 91PF 50V T2H 0402
1N2972A
Microchip Technology
DIODE ZENER 8.2V 10W DO213AA
GRM0335C1E9R9CA01D
Murata Electronics
CAP CER 9.9PF 25V C0G/NP0 0201
ADG408BRUZ
Analog Devices Inc.
IC MUX 8:1 100OHM 16TSSOP
PUSB3FA1Z
Nexperia USA Inc.
TVS DIODE 3VC DFN2510A-10
MMBT3904FA-7B
Diodes Incorporated
TRANS NPN 40V 0.2A 3DFN
VND5E025AYTR-E
STMicroelectronics
IC PWR DRVR N-CHAN 1:1 PWRSSO36
MPC885ZP133
NXP USA Inc.
IC MPU MPC8XX 133MHZ 357BGA
MAX3747EUB
Analog Devices Inc./Maxim Integrated
155MBPS TO 3.2GBPS, LIMITING AMP -

GRM1887U1H7R0DZ01D
Murata Electronics
CAP CER 7PF 50V U2J 0603
STM32F723VEY6TR
STMicroelectronics
IC MCU 32BIT 512KB FLSH 100WLCSP
TLV9032DSGR
Texas Instruments
IC COMPARATOR 2 GEN PUR 8WSON
SMCJ75CA
Yangjie Technology
SMC 1500W 121V 12.4A TVS Diodes
SPMWH1228FD5WARKSE
Samsung Semiconductor, Inc.
LED LM281B+ COOL WHT 5000K SMD
MAX3053ASA+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 1/1 8SOIC
LT4320HN8#PBF
Analog Devices Inc.
IC OR CTRLR BRIDGE RECT 8DIP
0805ZC105JAT4A
KYOCERA AVX
CAP CER 1UF 10V X7R 0805
LP2951ACMM-3.0
Texas Instruments
IC REG LIN POS ADJ 100MA 8VSSOP
0216.160MXP
Littelfuse Inc.
FUSE CERAMIC 160MA 250VAC 5X20MM
SSL21081T/1,118
NXP USA Inc.
IC LED DRIVER OFFLINE 2A 8SO
SI4850BDY-T1-GE3
Vishay Siliconix
MOSFET N-CH 60V 8.4A/11.3A 8SO
CC0805ZRY5V8BB684
YAGEO
CAP CER 0.68UF 25V Y5V 0805
1SV267-TB-E
onsemi
RF DIODE PIN 50V 150MW 3CP
18123C474KAT2A
KYOCERA AVX
CAP CER 0.47UF 25V X7R 1812
BAS70-04-HE3-18
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 70V SOT23
AD811AN
Analog Devices Inc.
IC AMP CURRENT FEEDBACK 8DIP
CC1206JRNPO9BN470
YAGEO
CAP CER 47PF 50V C0G/NPO 1206 -

KSC945YBU
Fairchild Semiconductor
TRANS NPN 50V 0.15A TO92-3
MAX3222IDBR
Texas Instruments
IC TRANSCEIVER FULL 2/2 20SSOP
PS21962-4
Powerex Inc.
MOD IPM 600V 5A SUPERMINI DIP
MSP430F5437AIPNR
Texas Instruments
IC MCU 16BIT 256KB FLASH 80LQFP
MAX223CAI+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/5 28SSOP
IRFBG30
Vishay Siliconix
MOSFET N-CH 1000V 3.1A TO220AB
SI5345A-D-GM
Skyworks Solutions Inc.
IC BASE/BLANK PROTOTYPING 64QFN
NL37WZ14USG
onsemi
IC INVERTER SCHMITT 3CH 3-IN US8
IRF7309TRPBF
Infineon Technologies
MOSFET N/P-CH 30V 4A/3A 8SOIC
F1857HD1000
Sensata-Crydom
MODULE SCR/DIODE 55A 380VAC
WSL2512R1250FEA
Vishay Dale
WSL-2512 .125 1% EA E3
3313J-1-501E
Bourns Inc.
TRIMMER 500OHM 0.125W J LEAD TOP
LT1963AEFE-1.8#TRPBF
Analog Devices Inc.
IC REG LINEAR 1.8V 1.5A 16TSSOP
AD7495ARMZ
Analog Devices Inc.
IC ADC 12BIT SAR 8MSOP
LTC3417AEFE-2#PBF
Analog Devices Inc.
IC REG BUCK ADJ DL 20TSSOP
1N5241B
Microchip Technology
DIODE ZENER 11V 500MW DO35
MIC5365-2.8YMT-TZ
Microchip Technology
IC REG LINEAR 2.8V 150MA 4TMLF
AH173-WG-7-B
Diodes Incorporated
MAGNETIC SWITCH LATCH SC59-3