TJA1050 트랜시버 설정 및 구성 안내서
TJA1050은 CAN 프로토콜 컨트롤러를 실제 버스에 연결하는 캔 트랜시버입니다.이 기사는 그 기능, 설정 및 실제 용도를 다루므로 TJA1050이 데이터 통신을 향상시키는 방법을 쉽게 이해할 수 있습니다.목록
TJA1050 개요
그만큼 TJA1050 CAN 프로토콜 컨트롤러와 실제 버스 간의 링크 역할을하여 데이터가 이러한 지점에서 원활하게 움직일 수있는 방법을 만듭니다.고속 환경에서 신뢰할 수있는 솔루션으로 빠르고 일관된 데이터 전송이 필요한 시스템에 적합합니다.설계는 전자기 방출을 최소화하므로 시스템의 다른 부분에서 간섭을 방지하는 데 도움이됩니다.이 기능은 특히 다른 구성 요소가 밀접하게 포장되는 네트워크에서 특히 가치가 있으며 배출량을 줄이면 이러한 부품이 혼란없이 작동 할 수 있습니다.
노드에 힘이없는 경우 TJA1050은 안정성을 유지하여 전체 네트워크가 영향을받지 않도록합니다.이전 트랜시버와 달리이 모델은 대기 모드를 건너 뜁니다. 시스템의 일부가 때때로 나머지 네트워크에 영향을 미치지 않으면 서 전원 다운 상태로 들어갈 수있는 부분적으로 전원 전원 네트워크에 이상적입니다.이 기능은 시스템이 종종 중단되지 않은 연결이 필요한 자동차 또는 산업 환경에서 특히 도움이됩니다.
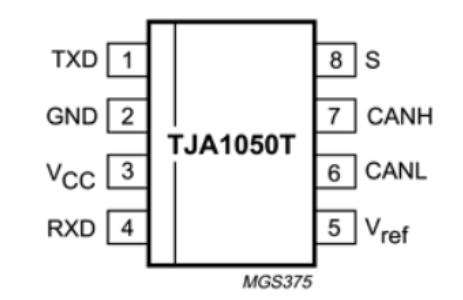
TJA1050 핀 구성
| 상징 | 핀 | 설명 |
| TXD | 1 | 데이터 입력 전송;CAN 컨트롤러에서 버스 라인 드라이버로의 데이터를 읽습니다. |
| Gnd | 2 | 지면 |
| VCC | 3 | 공급 전압 |
| RXD | 4 | 데이터 출력 수신;버스 라인에서 CAN 컨트롤러로의 데이터를 읽습니다. |
| vref | 5 | 참조 전압 출력 |
| 캔 | 6 | 저수준 캔 버스 라인 |
| canh | 7 | 높은 수준의 캔 버스 라인 |
| 에스 | 8 | 고속 모드 또는 자동 모드의 입력을 선택하십시오 |
TJA1050 CAD 디자인
TJA1050 CAD 기호

TJA1050 PCB 발자국
TJA1050 3D 모델 설계
TJA1050의 주요 기능
고속 데이터 전송
TJA1050은 최대 1 MBAud에 도달하는 빠른 데이터 전송을 가능하게하므로 빠르고 신뢰할 수있는 커뮤니케이션이 우선 순위가 높은 고속 네트워크를 처리 할 수 있습니다.이 기능은 자동차 및 산업 네트워크와 같은 연속적이고 고성능 데이터 교환이 필요한 설정에 특히 유용합니다.
ISO 11898 표준 준수
TJA1050은 ISO 11898 표준을 충족하여 다른 CAN 기반 시스템과의 호환성을 보장합니다.이 규정 준수는 호환성 문제없이 다양한 네트워크에 통합 할 수 있으므로 다양한 프로젝트에 대한 다양한 선택이 될 수 있습니다.
낮은 전자기 방출 (EME)
전자기 방출 설계가 낮은 TJA1050은 인근 전자 장치와의 간섭 위험을 줄이는 데 도움이됩니다.이 기능을 통해 트랜시버는 자동차 또는 산업 환경과 같이 장치가 밀접하게 간격을 두는 환경에서도 효과적으로 작동 할 수 있습니다.
전자기 면역을위한 넓은 공통 모드 범위 (EMI)
TJA1050의 광범위한 공통 모드 범위는 전자기 간섭에 대한 면역력을 향상시켜 전자기 소음이 높은 환경에서 안정적인 성능을 유지하는 데 도움이됩니다.이 안정성은 데이터 전송이 외부 교란의 영향을받지 않도록하는 데 필수적입니다.
전원이없는 노드 안정성
TJA1050의 고유 한 이점 중 하나는 일부 노드가 힘이 없어도 CAN 버스를 안정적으로 유지하는 능력입니다.이 기능은 네트워크의 일부가 때때로 전원을 공급할 수있는 응용 분야에서 가치가 있으며, 나머지 시스템은 중단없이 작동 할 수 있습니다.
데이터 (TXD) 우세한 시간 초과를 전송합니다
지배적 상태가 너무 오래 유지되면 TXD 우세한 타임 아웃 기능은 전송 오류를 자동으로 중지하여 전송 오류를 방지합니다.이 기능은 의도하지 않은 간섭 또는 신호 중단으로부터 네트워크를 보호하여 전반적인 네트워크 안정성을 지원합니다.
침묵 모드
Silent Mode 기능을 사용하면 송신기를 비활성화하여 TJA1050이 모니터링 또는 진단에 이상적입니다.이를 통해 장치는 신호를 보내지 않고 네트워크 활동을 관찰 할 수 있으며, 이는 지속적인 데이터 트래픽을 방해하지 않아야하는 시스템에서 도움이됩니다.
자동차 과도에 대한 보호
TJA1050에는 자동차 과도에 대한 내장 보호 기능이 포함되어있어 갑작스런 전압 스파이크로부터 보호됩니다.이 내구성은 트랜시버가 다양한 전기 시스템으로 인해 전압 변동이 일반적 인 차량에서 안정적으로 작동 할 수 있도록합니다.
3.3V 및 5V 장치와의 호환성
3.3V 및 5V 장치와 호환되는 TJA1050은 다양한 시스템에서 잘 작동하여 전압 호환성 문제없이 트랜시버를 프로젝트에 설계하고 통합하는 데 유연합니다.
열 및 단락 보호
TJA1050에는 열 보호 및 단락 탄력성이 장착되어 있으며 과열 및 배터리 또는 접지에 대한 우발적 인 연결로부터 보호합니다.이러한 기능은 장치의 내구성을 향상시켜 안전 및 성능 요구가 높은 응용 분야에서 안정적인 선택입니다.
최대 110 개의 노드를 지원합니다
최대 110 개의 노드를 지원하면 TJA1050은 네트워크 내의 많은 장치를 연결하여 대형 시스템에 적합합니다.이 용량은 네트워크에 과부하하지 않고 수많은 장치가 효과적으로 통신 해야하는 응용 분야에서 유리합니다.
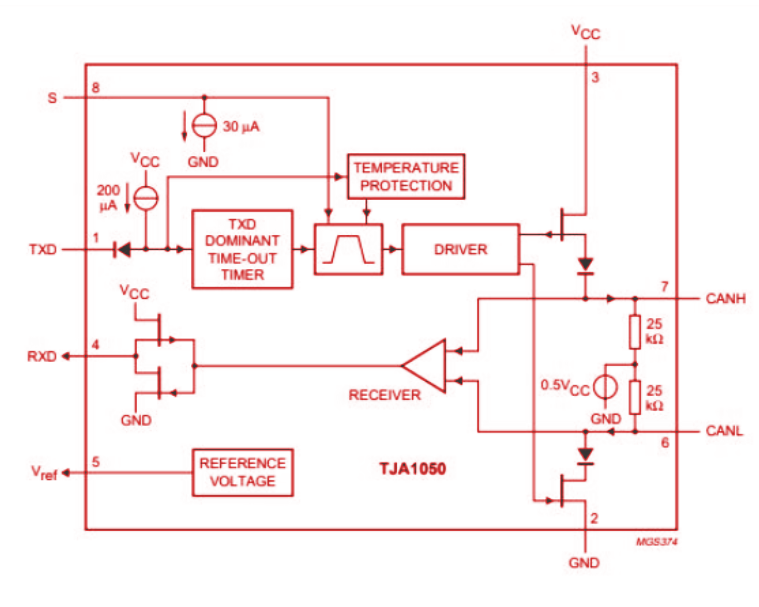
TJA1050 기능 블록 다이어그램
TJA1050의 블록 다이어그램은이 구성 요소가 데이터 흐름을 관리하는 방식을 시각적으로 나타냅니다.트랜시버가 데이터 신호를 보내고 수신하는 방법을 보여주고 Canh (고급)와 캔 (저수준) 라인 사이의 균형 잡힌 출력을 유지합니다.이 균형은 전자기 간섭을 제어하는 데 핵심이며, 장치가 높은 데이터 속도를 쉽게 처리 할 수 있습니다.블록 다이어그램의 각 섹션은 데이터가 처리 및 전송되는 방법을 보여 주므로 장치의 전체 작동을 이해하는 데 도움이됩니다.
ISO 11898을 포함하여 CAN 표준을 준수하면서 최대 1MBAud의 유연성, 최대 1MBAud의 처리 속도를 처리하여 설계되었습니다.이 접근법을 사용하면 TJA1050이 다양한 응용 프로그램에 완벽하게 적응하여 고속 데이터 통신 환경에서 장치의 기능과 안정성을 보여줍니다.
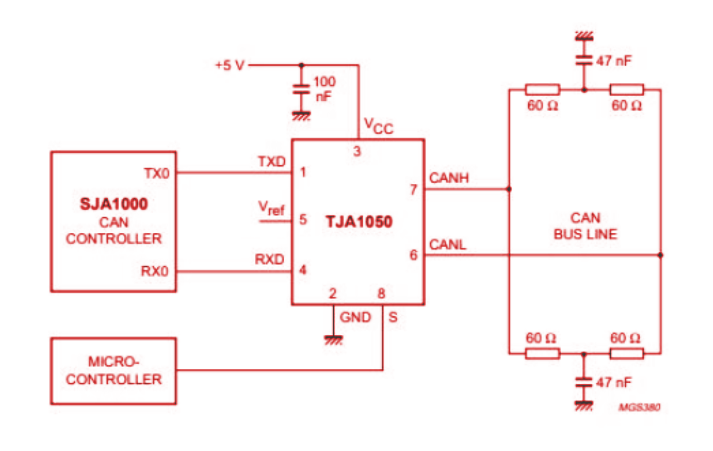
TJA1050 회로 및 응용 프로그램
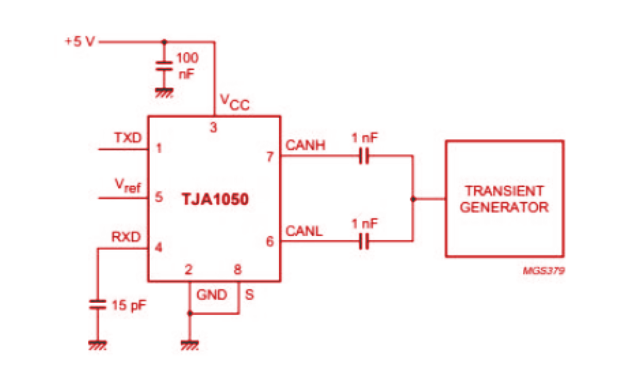
TJA1050 자동차 과도 시험 회로
TJA1050 사양
NXP USA Inc. TJA1050T/N, 118의 기술 사양, 속성, 매개 변수 및 비슷한 부분.
| 유형 | 매개 변수 |
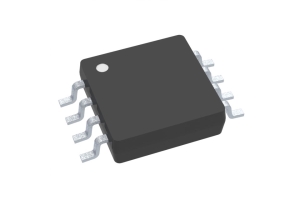
| 장착 유형 | 표면 마운트 |
| 패키지 / 케이스 | 8- SOIC (0.154, 3.90mm 너비) |
| 표면 마운트 | 예 |
| 작동 온도 | -40 ° C ~ 150 ° C |
| 포장 | 테이프 & 릴 (TR) |
| 게시 | 2002 |
| JESD-609 코드 | E0 |
| 부품 상태 | 쓸모없는 |
| 수분 감도 수준 (MSL) | 1 (무제한) |
| 종료 수 | 8 |
| 유형 | 트랜시버 |
| HTS 코드 | 8542.39.00.01 |
| 전압 - 공급 | 4.75V ~ 5.25V |
| 터미널 위치 | 이중 |
| 터미널 형태 | 갈매기 날개 |
| 피크 리플 로우 온도 (셀) | 지정되지 않았습니다 |
| 기능 수 | 1 |
| 공급 전압 | 5V |
| 터미널 피치 | 1.27mm |
| Time@Peak Reflow 온도 용량 (S) | 지정되지 않았습니다 |
| 기본 부품 번호 | TJA1050 |
| 핀 수 | 8 |
| JESD-30 코드 | R-PDSO-G8 |
| 자격 상태 | 자격이 없습니다 |
| 전원 공급 장치 | 5V |
| 전류-대변을 공급하십시오 | 0.075MA |
| 데이터 속도 | 1000Mbps |
| 규약 | canbus |
| 드라이버/수신기 수 | 1/1 |
| 이중 | 반 |
| 수신기 히스테리시스 | 70MV |
| 트랜시버 수 | 1 |
| 길이 | 4.9mm |
| 높이 좌석 (최대) | 1.75mm |
| 너비 | 3.9mm |
| ROHS 상태 | ROHS3 준수 |
자주 묻는 질문 [FAQ]
1. TJA1050과 MCP2551의 차이점은 무엇입니까?
TJA1050 및 MCP2551은 모두 CAN 프로토콜 컨트롤러와 실제 CAN 버스 사이의 인터페이스 역할을하지만 고유 한 기능이 있습니다.TJA1050은 고속 캔 네트워크 용으로 설계되었으며 컨트롤러와 버스 사이의 차동 전송 및 수신을 지원합니다.나머지 시스템에 영향을 미치지 않고 노드가 전원으로 전원을 공급할 수있는 네트워크에 적합합니다.반면에 MCP2551은 또한 고속 캔을 지원하지만 결함 공차로 알려져있어 EMI 및 ESD와 같은 외부 소스로 인한 고전압 스파이크로부터 컨트롤러를 보호합니다.이 기능은 버스에 추가 안정성 층, 특히 전기 노이즈가 발생하기 쉬운 환경에서 제공됩니다.
2. 일반적인 전압 레벨은 무엇입니까?
버스 전압 레벨은 라인에 따라 다릅니다.Canh (High) 라인에서, 전압은 일반적으로 유휴 상태 일 때 일반적으로 2.5 ~ 3.5 볼트 사이에 있으며, 일반적으로 작동 중에 약 2.7 ~ 3.3 볼트입니다.캔 (낮은) 라인에서, 전압은 일반적으로 유휴 상태 일 때 1.5 ~ 2.5 볼트이며, 달리기 조건에서는 1.7 ~ 2.3 볼트입니다.이 레벨은 CAN 버스에서 신뢰할 수있는 데이터 전송에 필요한 명확한 차동 신호를 유지하는 데 도움이됩니다.
3. TJA1050은 어떤 조건에서 작동합니까?
TJA1050은 4.75V ~ 5.25V의 공급 전압 범위 내에서 작동합니다.길이가 22.0mm, 폭 11.5mm, 높이 3.3mm 인 소형 모듈이며 무게는 약 0.8 ~ 1.0 그램입니다.TJA1050은 최대 110 개의 노드를 지원할 수 있으므로 여러 장치가 원활하게 통신 해야하는 더 큰 캔 네트워크에 적합합니다.
4. 라즈베리 파이가 캔 버스와 통신 할 수 있습니까?
Raspberry Pi에는 내장 CAN 버스 인터페이스가 제공되지 않지만 GPIO 핀에 SPI 버스가 포함되어 있으며 많은 CAN 컨트롤러가 널리 지원합니다.SPI 버스는 4 가지 연결을 사용합니다. Mosi (Mas.
5. MCP2515는 버스 컨트롤러가 TJA1050 드라이버 및 SPI 인터페이스와 어떻게 인터페이스 할 수 있습니까?
MCP2515 CAN 모듈은 TJA1050 트랜시버와 결합하여 SPI 인터페이스를 통해 통신 할 수 있습니다.이 모듈은 v2.0b 표준을 충족하며 최대 1Mbps의 데이터 속도를 지원합니다.5V DC 전원 공급 장치에서 작동하며 신호 안정성을 위해 120Ω 종결 저항이있는 8MHz 크리스탈 발진기를 갖습니다.Arduino와 같은 마이크로 컨트롤러에서 SPI 인터페이스에 연결 함으로써이 모듈은 CAN 버스 장치를 완벽하게 제어 할 수 있으므로 장거리 데이터 전송 및 신호 방사선 방지의 응용 프로그램을 가능하게합니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
LT1085 저하 전압 조절기
10월29일에서
LMV358 작동 증폭기에 관한 모든 것
10월29일에서
인기있는 게시물
-
회로에서 GND는 무엇입니까?
1월1일에서 2927
-

RJ-45 커넥터 가이드 : RJ-45 커넥터 색상 코드, 배선 체계, R-J45 응용 프로그램, RJ-45 데이터 시트
1월1일에서 2484
-

파이버 커넥터 유형 : SC 대 LC 및 LC 대 MTP
1월1일에서 2076
-
전자 제품 VCC, VDD, VEE, VSS 및 GND의 전원 공급 장치 이해
11월8일에서 1869
-

DB9와 RS232의 비교
1월1일에서 1757
-

LR44 배터리는 무엇입니까?
유비쿼터스 힘 인 전기는 사소한 기기에서 생명을 위협하는 의료 장비에 이르기까지 일상 생활의 모든 측면에 조용히 스며 들어 침묵하는 역할을합니다.그러나이 에너지, 특히 저장하고 효율적으로 출력하는 방법을 진정으로 파악하는 것은 쉬운 일이 아닙니다.이 기사는 표면에 중요하지 않은 것처럼 보일 수 있지만 실제 응용 분야, 즉 LR44 배터리에서 매우 다재다능한 코인 셀 배터리 유형에 초점을 맞출 것입니다.이 기사는 ...1월1일에서 1706
-
기본 이해 : 인덕턴스 저항 및 정관
전기 공학의 복잡한 춤에서, 기본 요소의 트리오는 인덕턴스, 저항 및 커패시턴스와 같은 중심 단계를 차지합니다.각각은 전자 회로의 역동적 인 리듬을 지시하는 독특한 특성을 나타냅니다.여기서 우리는 이러한 구성 요소의 복잡성을 해독하고 광대 한 전기 오케스트라 내에서 뚜렷한 역할과 실용적인 용도를 발견하기위한 여정을 시작합니다.자기 플럭스 마법사와 함께 인덕턴스;저항, 전류 흐름의 확고한 게이트 키퍼;그리고 ...1월1일에서 1649
-

CR2430 배터리 종합 가이드 : 사양, 응용 프로그램 및 CR2032 배터리 비교
CR2430 배터리는 무엇입니까?CR2430 배터리의 이점표준CR2430 배터리 애플리케이션CR2430 동등한CR2430 대 CR2032배터리 CR2430 크기CR2430 및 이와 동등한 것을 구입할 때 찾아야 할 사항데이터 시트 PDF자주 묻는 질문 배터리는 소형 전자 장치의 핵심입니다.사용 가능한 많은 유형 중에서 코인 셀은 일반적으로 계산기, 리모컨 및 시계에서 발견되는 중요한 역할을합니다.작은 크기에도 불구하고 각 코인 셀에는 독특한 장점이 ...1월1일에서 1536
-
RF는 무엇이며 왜 우리는 그것을 사용합니까?
무선 주파수 (RF) 기술은 현대 무선 통신의 핵심 부분으로, 물리적 연결없이 장거리에 걸쳐 데이터 전송을 가능하게합니다.이 기사는 RF의 기본 사항을 탐구하여 전자기 방사선 (EMR)이 RF 커뮤니케이션을 가능하게하는 방법을 설명합니다.우리는 EMR의 원칙, RF 신호의 생성 및 제어 및 광범위한 사용을 탐구 할 것입니다.이 기사는 또한 RF 기술의 역사적 이정표, 관련된 기술 과제 및 안정적인 RF 커뮤니케이션을 보장하는 데 ...1월1일에서 1529
-

CR2450 대 CR2032 : 대신 배터리를 사용할 수 있습니까?
리튬 망간 배터리는 다른 리튬 배터리와 유사합니다.높은 에너지 밀도와 긴 서비스 수명은 공통적 인 특성입니다.이러한 종류의 배터리는 고유 한 안전 때문에 많은 소비자의 신뢰와 호의를 얻었습니다.값 비싼 기술 가제트?우리 집의 작은 가전 제품?주위를 둘러 보면 어디에서나 볼 수 있습니다.이 많은 리튬-망간 배터리 중 CR2450 배터리와 CR2032 배터리는 특히 눈에 띄게됩니다.더 깊은 이해를 위해서는 차이점을 신중하게 ...1월1일에서 1497
핫 부품 번호
-

MWI30-12E6K
IXYS
IGBT MODULE 1200V 29A 130W E1
STR-Y6476
Sanken
AC/DC CONVERTER IC (INTEGRATED M
LMH6739MQX
Texas Instruments
IC VIDEO BUFFER TRIPLE 16SSOP
C0603X7R1H331M
TDK Corporation
CAP CER 330PF 50V X7R 0201
2225WC822KAT1A
KYOCERA AVX
CAP CER 8200PF 2.5KV X7R 2225
24AA024T-I/MNY
Microchip Technology
IC EEPROM 2KBIT I2C 400KHZ 8TDFN
STM32H743IGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 176LQFP
MCP112T-270E/TT
Microchip Technology
IC SUPERVISOR 1 CHANNEL SOT23-3
NSBA143ZF3T5G
onsemi
TRANS PREBIAS PNP 50V SOT1123
SN54LS151J
Texas Instruments
54LS151 DATA SELECTORS/MULTIPLEX
BFL4036
Sanyo
MOSFET N-CH 500V 9.6A TO220F-3FS
STN1N20
STMicroelectronics
MOSFET N-CH 200V 1A SOT223
MM74HCT05MTCX
onsemi
IC INVERTER OD 6CH 1-INP 14TSSOP
GRM1555C1E2R9BA01D
Murata Electronics
CAP CER 2.9PF 25V C0G/NP0 0402
TPS7B8550QWDRCRQ1
Texas Instruments
AUTOMOTIVE 150-MA, 40-V, LOW-DRO
ADF4111BCPZ-RL7
Analog Devices Inc.
IC CLK/FREQ SYNTH 20LFCSP
BLM18BB121SN1D
Murata Electronics
FERRITE BEAD 120 OHM 0603 1LN
VT261WFQX-ADJ
Analog Devices Inc./Maxim Integrated
IC CHIP ADJ QFN SMD -

LD411260
Powerex Inc.
DIODE MODULE 1.2KV 600A POWRBLOK
ADUM1201WURZ-RL7
Analog Devices Inc.
DGTL ISO 2500VRMS 2CH GP 8SOIC
AR1021T-I/ML
Microchip Technology
IC SCREEN CNTRL 10BIT 20QFN
TS5N412PW
Texas Instruments
IC SWITCH SPDTX4 12.5OHM 16TSSOP
NTE5989
NTE Electronics, Inc
DIODE GEN PURP 300V 40A DO5
FAN6248HCMX
onsemi
LLC SR CONTROLLER
HCPL-0302-000E
Broadcom Limited
OPTOISO 3.75KV 1CH GATE DRVR 8SO
B82432T1154K000
EPCOS - TDK Electronics
FIXED IND 150UH 160MA 6 OHM SMD
1206YC123MAT2A
KYOCERA AVX
CAP CER 0.012UF 16V X7R 1206
DMP2225LQ-7
Diodes Incorporated
MOSFET BVDSS: 8V~24V SOT23 T&R 3
EPM7064BTC44-3N
Intel
IC CPLD 64MC 3.5NS 44TQFP
MSP430G2453IPW20
Texas Instruments
IC MCU 16BIT 8KB FLASH 20TSSOP
2N4912
NTE Electronics, Inc
TRANS PNP 80V 4A TO66
DAC81402RHBR
Texas Instruments
IC DAC 16BIT V-OUT 32VQFN
GQM2195C2E5R6BB12D
Murata Electronics
CAP CER 5.6PF 250V NP0 0805
MAX1316ECM+T
Analog Devices Inc./Maxim Integrated
IC ADC 14BIT SAR 48LQFP
TC1015-3.3VCT713
Microchip Technology
IC REG LINEAR 3.3V 100MA SOT23-5
ISL6115CBZA-T
Renesas Electronics America Inc
IC HOT SWAP CTRLR GP 8SOIC -

SY100EL56VZC
Microchip Technology
IC DIFF DIG MULTPL 2X2:1 20SOIC
SN74ABT16541ADGGR
Texas Instruments
IC BUF NON-INVERT 5.5V 48TSSOP
CY8C4014PVI-412
Infineon Technologies
IC MCU 32BIT 16KB FLASH 28SSOP
RT0805DRE071KL
Yageo
RES SMD 1K OHM 0.5% 1/8W 0805
XC2V4000-4FFG1152I
AMD
IC FPGA 824 I/O 1152FCBGA
NUD3160DMT1G
onsemi
IC PWR DRIVER N-CHANNEL 1:1 SC74
AT24C64A-10TI-1.8
Microchip Technology
IC EEPROM 64KBIT I2C 8TSSOP
LDK320M33R
STMicroelectronics
IC REG LINEAR 3.3V 200MA SOT23-5
MC14001UBDR2G
onsemi
IC GATE NOR 4CH 2-INP 14SOIC
RT9165GX
Richtek USA Inc.
IC REG LINEAR 5V 150MA SOT89-3
MAX560CAI+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/5 28SSOP
BCM54612EB1KFBG
Broadcom Limited
SINGLE GIGABIT PHY
VJ1210Y153JXGAT5Z
Vishay Vitramon
CAP CER 0.015UF 1KV X7R 1210
SRP1245A-4R7M
Bourns Inc.
FIXED IND 4.7UH 12A 15 MOHM SMD
LT3015EMSE#PBF
Analog Devices Inc.
IC REG LIN NEG ADJ 1.5A 12MSOP
MTFC32GAZAQHD-AAT
Micron Technology Inc.
IC FLASH 256GBIT MMC 153VFBGA
X1288V14-2.7
Renesas Electronics America Inc
IC RTC CLK/CALENDAR I2C 14TSSOP
06033C682KAT2A
KYOCERA AVX
CAP CER 6800PF 25V X7R 0603